Buck型變換器數(shù)字PID控制器設(shè)計(jì)方法研究

模擬PID 控制器的傳遞函數(shù)為:

其比例、積分、微分形式為:

式中:Kp =K(wz1 +wz2 )/(wz1 wz2 );Ki =K;Kd =K/(wz1 wz2 )。
模擬PID 控制器的典型頻率特性曲線如圖3 所示。補(bǔ)償網(wǎng)絡(luò)可提供一個(gè)原點(diǎn)處極點(diǎn)用以消除系統(tǒng)的靜態(tài)誤差,同時(shí)提供兩個(gè)零點(diǎn)可補(bǔ)償主極點(diǎn)造成的180°滯后相移,有效提高系統(tǒng)的相位裕量。
在分析了Buck 型變換器及模擬PID 控制器典型頻率特性的基礎(chǔ)上,采用頻域補(bǔ)償設(shè)計(jì)法配置補(bǔ)償網(wǎng)絡(luò)零極點(diǎn),實(shí)現(xiàn)模擬PID 控制器的參數(shù)整定。
模擬PID 控制器零極點(diǎn)配置原則如下:
(1)選擇補(bǔ)償后系統(tǒng)開環(huán)傳遞函數(shù)的穿越角頻率:
穿越角頻率wc一般取1/10 ~1/5 的開關(guān)角頻率ws處,以在保證系統(tǒng)穩(wěn)定性的前提下,使輸出響應(yīng)具有良好的動(dòng)態(tài)特性;(2)確定補(bǔ)償網(wǎng)絡(luò)兩零點(diǎn)角頻率:補(bǔ)償網(wǎng)絡(luò)的兩零點(diǎn)角頻率wz1 、wz2設(shè)計(jì)為控制對(duì)象主極點(diǎn)角頻率wp的1/2 左右,以補(bǔ)償主極點(diǎn)產(chǎn)生的180°滯后相移,提高系統(tǒng)的相位裕量;(3)計(jì)算補(bǔ)償網(wǎng)絡(luò)的增益值:在穿越角頻率wc處補(bǔ)償后系統(tǒng)開環(huán)傳遞的增益為零,即|Gvdm(s )|s =jwc =1/|Gc (s )|s =jwc ,據(jù)此計(jì)算補(bǔ)償網(wǎng)絡(luò)增益值K。
按照以上步驟即可完成模擬PID 控制器參數(shù)(Kp 、Ki 、Kd )的整定。
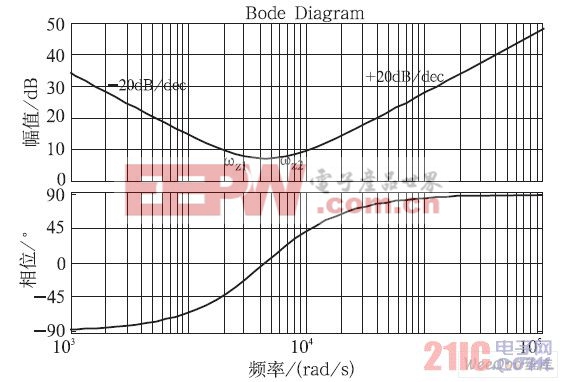
圖3 模擬PID 控制器典型頻率特性曲線
2 .2 數(shù)字PID 控制器的參數(shù)設(shè)計(jì)
數(shù)字PID 控制器的控制算式為:

式中:Δup =e(k)-e(k-1 );Δu1 =e(k);ΔuD =e(k)-2e(k-1)+e(k-2)。
模擬PID 控制器參數(shù)整定完成后,將模擬控制器離散化即可實(shí)現(xiàn)數(shù)字PID 控制器的設(shè)計(jì)。本文選用后向差分法作為連續(xù)系統(tǒng)離散化方法。
后向差分公式為:

選取采樣周期T,對(duì)式(3 )進(jìn)行離散化處理,整理得:

將上式與數(shù)字PID 控制算式對(duì)比,可得模擬PID控制器參數(shù)離散化公式:


pid控制器相關(guān)文章:pid控制器原理








評(píng)論