基于THB6064H的步進電機閉環控制電路設計

需要注意的是,上位機向單片機發送控制信號的時候要經過光耦隔離。光耦隔離的作用有兩個:第一,防止電機干擾和損壞前級芯片;第二,對控制信號進行整形。對于控制信號CLK和CW/CCW要選用中速或者高速的光耦,以保證信號經過光耦后不會發生延遲或者變形而影響步進電機的驅動。
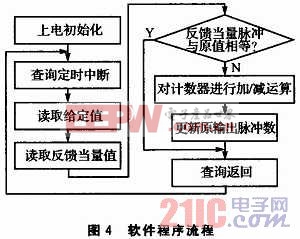
4 軟件設計
軟件設計中初始化設置要定義各端口的功能,電機的初始化主要是運行前設置端口的I/O方向,確定所選擇的細分驅動方式等。之后,要實時獲得電機的工作狀態和驅動電機運轉,并在中斷服務程序中處理電機的丟步和轉向控制。現代單片機運行速度都很快,所以對編碼器采用軟件鑒相,既簡化電路結構,又節約成本。將編碼器的A相與單片機的外部中斷INT0相連,B相與普通I/O口的P1.0相連。由于編碼器的A相與B相在輸出上有固定的相位關系,正轉與反轉時編碼器的A、B兩相的電平信號不同,正轉時,每當A相出現高電平的前四分之一周期時,B相為高電平;反轉時,每當A相出現高電平的前四分之一周期時,B相為低電平。因此,單片機使用外部中斷0來處理編碼器數據,把編碼器的A相接中斷源。在中斷服務程序中,程序通過讀取B相(P1.0口)的狀態來確定編碼器的轉向,進而完成加1或者減1的雙向計數。軟件程序流程如圖4所示。本文引用地址:http://www.104case.com/article/162183.htm
結語
本文提出了基于驅動芯片THB6064H的步進電機閉環控制電路設計方案。硬件設計將低成本的51單片機與步進電機專用驅動芯片一體化(目前基本都是分立開的),既可以實現所需功能,又能降低成本。該電路結構簡單、動態特性好、適應性強、速度快、精度高、性能穩定。采用
編碼器作為位置反饋,既能使步進電機達到伺服電機的高速度、高精度效果,又能降低成本,在各種車床、切割機、雕刻機等數控場合有很高的實用價值。

電路相關文章:電路分析基礎






評論