基于THB6064H的步進電機閉環控制電路設計

3.2 反饋控制電路
電路的反饋環節選用增量型旋轉編碼器與步進電機固定同軸旋轉,產生反饋脈沖信號,發送到單片機,經單片機處理后獲得步進電機的旋轉信息。
3.2.1 旋轉編碼器的工作原理
旋轉編碼器是一種集光、機、電于一體的轉速、位移傳感器,具有高頻響、分辨能力高、力矩小、耗能低、性能可靠、使用壽命長等優點。旋轉編碼器包括碼盤(編碼盤的線數不同)、發光元件、接收元件和信號處理部分。碼盤的線數決定了其精度。當步進電機帶動碼盤旋轉時,因刻線處透光,間隔處不透光,透過的光被接收元件接收并輸入到信號處理部分,產生脈沖信號輸出。旋轉編碼器一般分為增量式和絕對式:增量式旋轉編碼器輸出脈沖供后續電路計數和旋轉方向的判斷,能夠實現多圈無限累計測量;絕對式旋轉編碼器以代碼的形式輸出來表示當前的位置,轉動方向是通過代碼的變化趨勢來確定的。一般相同分辨率的編碼器,增量式的要比絕對式的便宜,實際應用中,增量式旋轉編碼器應用更為廣泛。本文選用增量型旋轉編碼器,有三根信號輸出線A相、B相、Z相。當編碼器轉動時A、B兩根線都產生脈沖輸出,A、B兩相脈沖相差90°相位角,由此可測出編碼器的轉動方向與電機轉速。當正轉時,A相脈沖比B相脈沖超前90°,反轉時A相比B相落后90°。A相用來測量脈沖個數,B相與A相配合就可測量出轉動方向。Z相為零脈沖線,光電編碼器在每轉一圈的固定位置產生一個脈沖,主要用作計數和基準點定位,一般可以不用該相。
3.2.2 控制電路
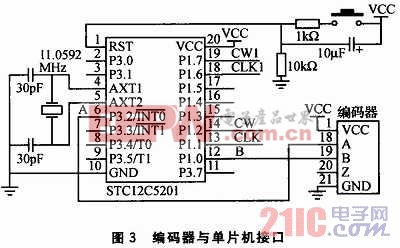
控制部分電路是以51單片機為控制核心,接收上位機的脈沖信號和方向信號CLK1和CW1經過存儲處理后發送給驅動電路部分驅動步進電機工作。另外,單片機還要實時接收來自旋轉編碼器的反饋脈沖信號,對編碼器的兩相反饋脈沖信號進行處理,判斷步進電機的位置和旋轉方向是否與給定信息相符合,如果不相符就調用相應的算法進行自動補償,最終使步進電機達到預定的位置。由于旋轉編碼器的分辨率有高有低,如果選擇高分辨率的旋轉編碼器,在細分情況下,當步進電機在最高轉速時,要求單片機的相應速度要符合要求。本設計選用的單片機為宏晶科技的STC12C5201單片機,1個時鐘/機器周期,增強型8051內核,速度比普通8051快8~12倍。一般程序稍大的可選用STC12C5202或者STC12C5204。編碼器與STC12C5201的接口如圖3所示。本文引用地址:http://www.104case.com/article/162183.htm

電路相關文章:電路分析基礎






評論