基于T-S模型的旋轉式起重機穩鉤保性能控制

各參數選擇:l=1 m,g=9.8 m/s2,m=5 kg,通過Matlab提供的函數linmod將原旋轉式起重機小車精確模型在0°和±45°三個工作點處線性化,得到線性化狀態空間模型。
在0°處的狀態空間模型為,其中:
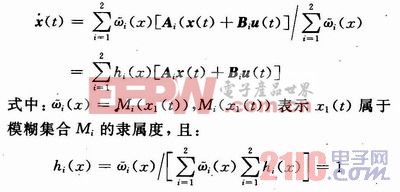
系統的輸出為各個子系統輸出的加權平均,即:
3 基于T-S模型的最優保性能控制
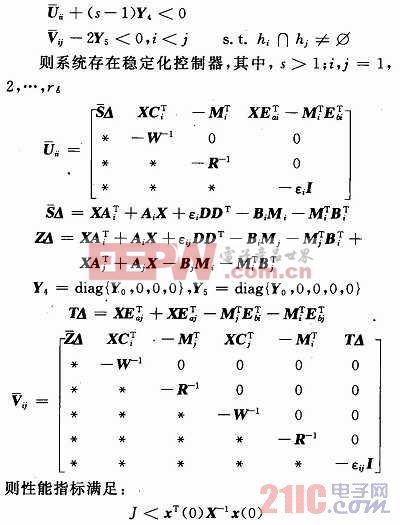
定理1 對于所描述的系統,若存在矩陣X,Mi,和Y0,以及標量εi>0和εij>0(i>j),且X是對稱正定矩陣,Y0是對稱半正定矩陣,滿足:
在定理1的基礎上,進一步設計一個模糊控制器,使其性能指標上界xT(0)Px(0)最小化。最優保性能模糊控制律可以通過求解以下的優化問題得到:
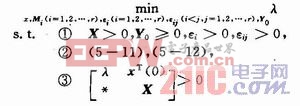
問題是一個具有線性矩陣不等式約束的凸優化問題,可以應用LMI工具箱中的線性矩陣不等式求解器mincx來求解問題。







評論