基于T-S模型的旋轉式起重機穩鉤保性能控制

摘要:基于T-S模型的保性能控制對控制帶有不確定性系統(如旋轉式起重機穩鉤系統)有很好的魯棒性,把系統可穩和保性能控制轉化為解一系列矩陣不等式(LMI)的問題,得出最優的反饋矩陣,設計出基于T-S模型的最優保性能控制器,并對這種方法進行了仿真。結果表明,這種方法簡單可行,并且具有很好的魯棒性。
關鍵詞:旋轉式起重機穩鉤;T-S模型;保性能控制;魯棒性
0 引言
近年來,隨著貨物運輸方式的飛速發展,旋轉式起重機穩鉤技術越來越得到人們的重視,它直接決定了的裝卸速度。Y.Kijima等人利用模糊控制與遺傳算法相結合來優化模糊控制規則的系數;劉殿同等用遺傳算法優化模糊控制器參數的方法和滑模變結構方法來對旋轉式起重機穩鉤進行控制;Amel Ouezri等人采用了神經網絡來優化模型控制器隸屬度和規則的方法,上述三種方法計算復雜,且都把旋轉式起重機作為確定系統來研究,魯棒性不強,Dal-Young Ha使用TSK模糊控制器簡化了系統的輸入輸出表達,KunihitoMatsuki利用H∞控制理論來對誤差與參數變化進行控制,這兩種方法有一定的魯棒性。但這些方法都把旋轉式起重機作為一個確定的系統來研究,并且有各自的缺點。
旋轉式起重機很復雜,由于貨物的不確定性和繩長的撓性等特點,以及在控制系統的運行過程中還會出現風載荷的變化、元件老化等問題,所以旋轉式起重機的模型是一個不確定非線性二階系統,因此需要由基于T-S模型的保性能控制這樣魯棒性很強的方法來進行控制。
這種方法不但能使系統穩定,還可以使系統保住一些性能,使得在外界變化和內部結構發生變化時系統的參數變化不至于過快。
1 問題的描述
所要研究的對象為起升的起吊系統,在系統局部信息或專家經驗存在的條件下,像旋轉式起重機這樣的不確定非線性連續系統可以采用具有不確定參數的T-S模糊模型:
為貨物偏擺角的變化;為貨物偏擺角的加速度;為變幅時的加速度。取狀態向量為:
![]()
則有如下的狀態方程:
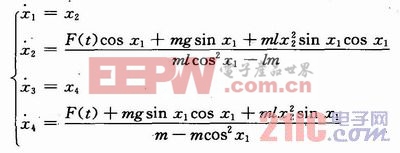
這是一個非線性狀態方程,非線性系統的分析和控制仍然是很困難的,尚缺乏統一有效的方法。為此,基于多模型處理的思想,采用基于T-S模型的模糊控制方法來設計控制器,由于T-S模型的后件是線性的,線性系統中很多成熟的理論可以加以利用,而且與其他模糊推理相比,其計算效率(線性函數和常值函數易于計算)、推理速度快。為了運用線性系統理論和模糊控制中的T-S模型進行控制器的分析和設計,可以考慮將其先進行局部線性化,使之成為若干子系統,再將這若干子系統進行模糊綜合。該模糊建模方法的本質在于將一個整體非線性的動力學模型用多個局部線性模型進行模糊逼近。







評論