數控機床大推力永磁同步直線電機控制方法

PMAC在傳統PID控制算法的基礎上增加了速度和加速度的前饋控制,其中,速度前饋用于減小由于微分增益的引入所引起的跟隨誤差,加速度前饋用于減小系統慣性所帶來的跟隨誤差。PMAC嵌入的PID和前饋控制的控制算法如圖4所示。本文引用地址:http://www.104case.com/article/161818.htm
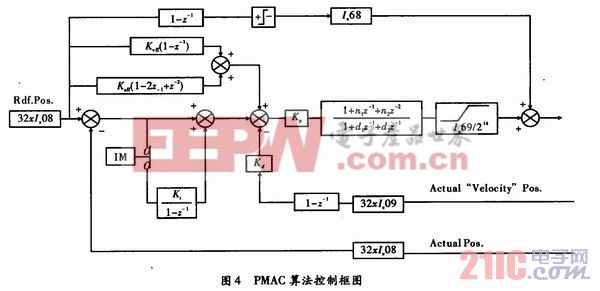
圖4中,Kp比例增益,為系統提供剛度;Kd微分增益,提供系統穩定需要的阻尼;Kvff速度前饋增益,減小因阻尼引起的跟隨誤差;Ki積分增益消除穩態誤差;Kaff加速度前饋增益減小系統慣性帶來的跟隨誤差。
其控制算法的實際公式如下

其中,DACout(n)為16位的伺服周期輸出命令轉換成 -10~+10 V;Ix08為電機x的一個內部位置放大系數;Ix09為電機x速度環的一個內部放大系數;FE(n)是伺服周期n內所得的跟隨誤差,即為該周期內命令位置和實際位置的差值;AV(n)是伺服周期n內的實際速度,即為每個伺服周期最后兩個實際位置的差值;CV(n)是伺服周期n內的指令速度,即為每個伺服周期最后兩個指令位置的差值;CA(n)是伺服周期n內的指令加速度,即為每個伺服周期最后兩個指令速度的差值;IE(n)是伺服周期n的跟隨誤差的積分,大小為![]() 。
。
2 實驗用直線電機簡介
該電機應用于龍門五軸加工中心立柱上,最大推力12 000 N,低速可至1 m·min-1,最高速度可達1 m/s。具有大推力、速度范圍寬特點,是提供直線進給的優良系統,電機實物如圖5所示。

直線電機底部為次級板,其結構呈U型,次級長1.32 m,寬0.26 m,高0.17 m,材料由ZG35鑄造而成,表面鍍鋅,N級磁鋼和S級磁鋼交替貼在次級表面時,并且要使同一極板兩側極性相反,同一側的兩片相鄰磁鋼用分隔條隔開,用膠粘牢固后,灌環氧樹脂密封成整體。
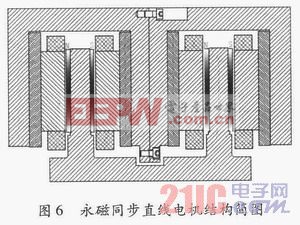
直線電機的初級是由兩塊安裝板并聯在一起,長1.4 m,寬0.36 m,高0.22 m,由鑄鐵35鑄造而成,經過加工后,表面鍍白鋅,水冷板介于次級線圈與安裝板之間,由鑄鋁制成,內嵌有鋁管,用于通水為初級線圈冷卻。

pid控制器相關文章:pid控制器原理






評論