方向盤轉向角傳感器的數據采集系統設計

3.2 在上位機上對方向盤轉向角傳感器接收的數據進行處理
ARM通過CAN總線把從轉向角傳感器接收的數據通過串口送到上位機上,并且以txt的格式存儲在上位機上,由于Matlab具有強大的數據處理及可視化功能,所以在上位機上利用Matlab對接收來的數據進行處理。由于方向盤轉向角傳感器的數據是通過CAN總線以幀的形式進行發送的,是一串十六進制數字,分別代表的是轉向角傳感器采集到的方向盤轉角,轉角方向以及角速度,在實際應用中需要對這些數據進行分割,從中提取出方向盤的轉角,轉角方向以及角速度。其相應的轉向角方向以及轉向角顯示結果如圖5所示。本文引用地址:http://www.104case.com/article/161282.htm
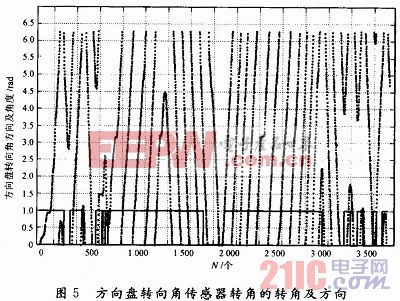
圖5中橫坐標N是采集的數據量,取了4 000個數據點。以采集第一個數據的時間為0時刻,以后每個數據點之間的時間間隔是10.3 ms,由于數據點比較多,橫坐標只取了具有代表性的數據點。圖中縱坐標分別代表的是方向盤轉向角傳感器轉角的方向和大小,用藍色的點表示轉角的大小(采用弧度制),紅色的曲線表示轉角的方向。方向盤轉向角的方向,順時針方向用1來表示,逆時針方向用0來表示,在Matlab中通過繪圖的方式把這些數據形象的顯示出來。
4 結論
本文通過對轉向角傳感器數據采集系統的設計,采集到了方向盤轉向角傳感器的轉向角,轉向角速度和方向三個參數,并對采集到的數據進行了相應處理。經分析表明,方向盤轉向角傳感器的數據采集系統設計是有效的、可行的,能為汽車前向燈自適應控制提供準確的方向盤轉向角相關參數信息。











評論