基于Cortex-M3內核MCU的BLDCM控制器研究

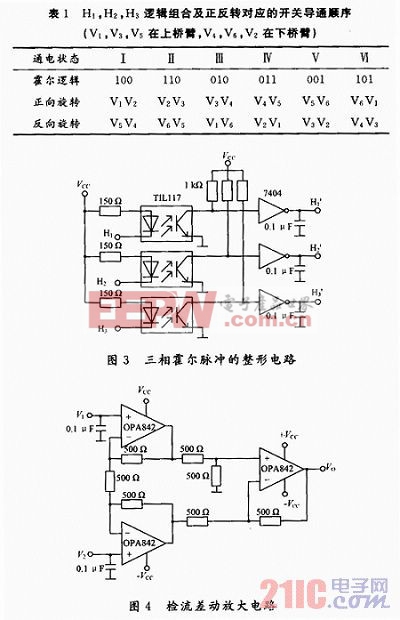
電機內部的三個霍爾元件在空間彼此相隔120°電角度,與其配套的永磁體的極弧寬為180°,轉子旋轉時,三個霍爾元件將交替輸出三個寬為180°、相位互差120°的矩形波信號(H1,H2,H3)。這三路信號經過進一步整形(圖3為三相霍爾脈沖信號的整形電路)后被MCU的CAP端口捕捉,捕捉信息一方面作為換相邏輯參與生成并輸出PWM信號,另一方面速度計算模塊利用其中一路脈沖(如H1,應注意電機極對數為P時,每轉有P個方波)的前后沿時間間隔計算得到轉速反饋值。控制器將轉速反饋值送至LCD顯示的同時將其與轉速設定值比較并獲得轉速偏差,再經ASR運算得到電流給定值,電流反饋值與電流給定值相比較便得到電流偏差值,再經ACR運算得到PWM占空比調節值。PWM模塊根據所得占空比值和換相邏輯在母線電流未超限時輸出PWM并通過高速光耦TIL117送給驅動電路IR2130。本文引用地址:http://www.104case.com/article/161143.htm
考慮到可靠性,MOSFET逆變橋驅動電路采用集成器件IR2130。IR2130自身的工作電源電壓的范圍較寬(3~20 V),并可對同一橋臂上下2個功率器件的柵極驅動信號產生2μs的互鎖延時,能有效避免直通短路。
2.2 控制算法選擇及檢測處理方法
由LM3S615構建的控制器采用了電流內環、轉速外環的雙閉環控制策略。考慮BLDCM是一種自控式電機,MCU運算能力不比DSP,同時包括電機在內的全系統運行性能也受電機自身性能影響,所以ASR和ACR無需采用過于復雜的算法,這里兩者均采用增量式PI算法,與位置式PI算法相比增量式PI算法不需要累加,控制器只輸出增量,受誤動作影響較小,控制增量僅與最近K次的采樣值有關,容易通過加權處理而獲得較好的控制效果。PI參數整定時可先固定積分環節為零,調節比例環節至系統響應穩定,然后再調節積分環節來改善系統的動態響應和靜態穩定性能。
圖3中三路霍爾信號經高速光耦隔離后再通過上拉電阻、非門、電容整形濾波后送至單片機,TIL117輸入回路有一定輸入電流需求,不能用霍爾信號直接驅動,光耦輸出接反相器后恢復了原信號的邏輯狀態。
對BLDCM母線電流的檢測方法有傳感器法和串電阻法等,用霍爾等傳感器檢測電流時線路相對復雜、成本較高,在被檢電流較小時檢測精度會受影響,母線串電阻法簡單,但應注意控制電阻功耗。這里通過串電阻法檢測母線電流,為降低電阻功耗并保證檢測精度,選擇了美國威世公司0.47 Ω檢流用高精度小電阻,預計功耗不超過0.1 W。用導線從檢流電阻兩端引出,經濾波后接入圖4所示電路,該電路是利用TI公司的寬帶低噪音運放OPA842ID搭建的高輸入阻抗差動放大電路,它能有效放大兩路輸入信號差值。差動電路輸出送至MCU的ADC1通道進行10位A/D轉換,圖4為檢流差動放大電路。

霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理









評論