基于WLAN與單神經(jīng)元自適應(yīng)PID的空調(diào)系統(tǒng)設(shè)計(jì)

WLAN控制模塊的設(shè)計(jì):系統(tǒng)中采用ADAM4550無(wú)線調(diào)制解調(diào)模塊作為中間數(shù)據(jù)采集器,ADAM-4550是一款新型直序擴(kuò)頻無(wú)線調(diào)制解調(diào)器。它在2.4 GHz ISM頻段上工作,無(wú)須申請(qǐng)執(zhí)照。它提供了可用于通訊的RS-232和RS-485接口,通訊速率可達(dá)到115.2 kbps。它使用1 Mbps的廣播速率以半雙工方式工作。調(diào)制解調(diào)器具有100 mW的輸出功率。使用其背面的拉桿天線時(shí),可以有150 m的有效傳輸距離。當(dāng)使用研華提供的高增益外接支桿式天線時(shí),它的通訊范圍有可能超過20km(開闊空間)。
3 軟件設(shè)計(jì)
根據(jù)系統(tǒng)功能要求,軟件設(shè)計(jì)分為兩部分:
現(xiàn)場(chǎng)控制器的軟件設(shè)計(jì)主要由數(shù)據(jù)采集程序、初始化程序、算法控制運(yùn)算程序、參數(shù)發(fā)送及顯示程序、故障診斷報(bào)警程序等組成。軟件功能為實(shí)時(shí)采集溫濕度、設(shè)備報(bào)警、風(fēng)機(jī)的工作狀態(tài)等模擬、數(shù)字信號(hào),根據(jù)控制算法通過控制新回風(fēng)閥及冷熱水的開度大小進(jìn)行溫濕度的控制。
主機(jī)控制軟件包括數(shù)據(jù)庫(kù)(用DELPHI編程),溫濕度查詢、接收火盜警信號(hào),然后進(jìn)行相應(yīng)處理后給下位機(jī)即現(xiàn)場(chǎng)控制器發(fā)出指令,并對(duì)數(shù)據(jù)進(jìn)行存檔和歸表以便查詢調(diào)用。
4 單神經(jīng)元自適應(yīng)PID算法控制
單神經(jīng)元作為構(gòu)成神經(jīng)網(wǎng)絡(luò)的基本單位,具有自學(xué)習(xí)和自適應(yīng)能力,而且結(jié)構(gòu)簡(jiǎn)單,易于計(jì)算。傳統(tǒng)的PID調(diào)節(jié)器也具有結(jié)構(gòu)簡(jiǎn)單,調(diào)整方便和參數(shù)整定與工程指標(biāo)聯(lián)系密切等特點(diǎn)。將兩者結(jié)合,可以在一定程度上解決傳統(tǒng)PID調(diào)節(jié)器對(duì)一些參數(shù)時(shí)變系統(tǒng)進(jìn)行有效控制的不足。
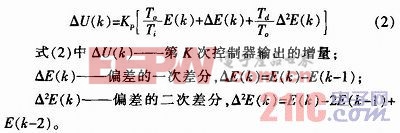
常規(guī)PID控制器的控制算法式為
式(1)中為實(shí)際值與給定值的偏差,e(t)=yr-y;Kp為比例增益;Ti為積分時(shí)間常數(shù);Td為微分時(shí)間常數(shù)。當(dāng)采用周期T。較短時(shí),離散化后,可得常規(guī)PID控制的增量型算式為:
結(jié)合以上的常規(guī)PID調(diào)節(jié)器的控制機(jī)理,一個(gè)基于單神經(jīng)元模型的自適應(yīng)PID控制器的結(jié)構(gòu)圖如圖3所示。本文引用地址:http://www.104case.com/article/161079.htm
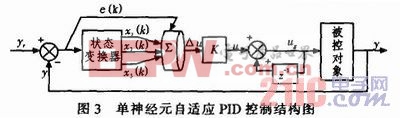
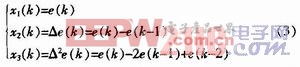
圖中狀態(tài)變換器的輸入為系統(tǒng)的輸出偏差信號(hào)e(k),yr為設(shè)定輸入,y為過程的實(shí)際輸出,ri為性能指標(biāo)或遞進(jìn)信號(hào),K為神經(jīng)元比例系數(shù),K>0。該單神經(jīng)元控制器有3個(gè)狀態(tài)變量xi(k)、x2(k)、x3(k),這里分別取為:







評(píng)論