慣性傳感器促進移動機器人自主工作

Allan 方差 關系式還有助于深入了解最佳積分時間(τ = t2 – t1)。該曲線上的最低點通常被確定為運行中偏置穩定度。通過設置積分時間 ,使其等于與所用陀螺儀的Allan方差曲線上最低點相關的積分時間,可優化駛向估算結果。
包括偏置溫度系數在內的條件相關誤差會影響性能,因此它們可決定需要每隔多久停止一次機器人的運行,以更新其偏置校正。使用預校準的傳感器有助于解決最常見的誤差源,例如溫度和電源變化。例如,將ADIS16060改為預校準的ADIS16265可能會增加尺寸、價格和功率,但可以將相對于溫度的穩定性提高18倍。對于2°C溫度變化,ADIS16060的最大偏置為0.22°/秒,而ADIS16265只有0.012°/秒。
如以下關系式所示,靈敏度誤差源與實際駛向變化成正比:
商用MEMS傳感器的額定靈敏度誤差通常在±5%至±20%以上,因此需要進行校準以減小這些誤差。例如ADIS16265和 ADIS16135等預校準MEMS5陀螺儀的額定誤差小于±1%,在受控環境中甚至可以達到更高性能。
應用范例:
倉庫庫存交貨
倉庫自動化系統目前使用叉車和傳送帶系統移動材料,以管理庫存并滿足需求。叉車需要直接人為控制,而傳送帶系統則需要定期維護。為了最大化倉庫價值,許多倉庫正在進行重新配置,從而為自主機器人平臺的應用敞開了大門。一組機器人僅需要更改軟件、對機器人導航系統進行再培訓就能適應新任務,完全不需要實施大量工程作業來改造叉車和傳送帶系統。倉庫交貨系統中的關鍵性能要求是機器人必須能夠保持行程模式的一致性,可在有障礙物移動的動態環境下安全執行機動動作,并且保證人員安全。為了說明在此類應用中MEMS陀螺儀反饋對Seekur的價值,Adept MobileRobots用實驗方式分別展示了在不使用(圖 8)和使用(圖 9)MEMS陀螺儀反饋的情況下,Seekur保持重復路徑的能力。應注意,為了研究MEMS陀螺儀反饋的影響,該實驗未采用GPS或激光掃描校正。
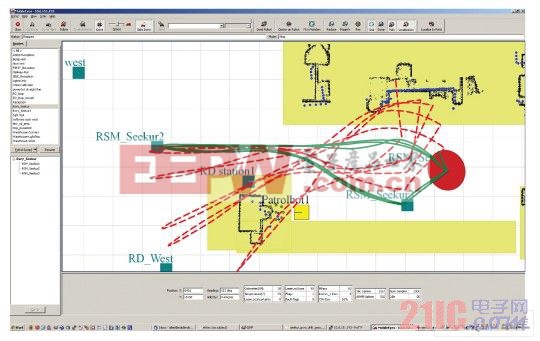
圖 8. 未使用MEMS陀螺儀反饋時的Seekur路徑精度。
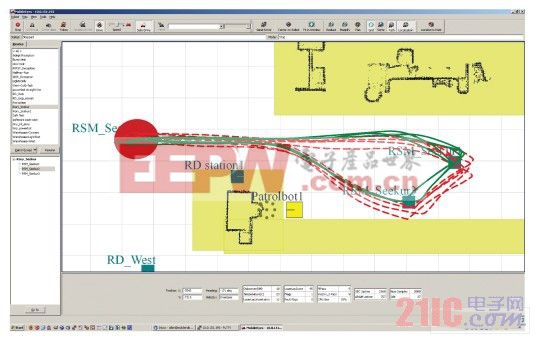
圖 9. 使用MEMS陀螺儀反饋時的Seekur路徑精度。








評論