慣性傳感器促進移動機器人自主工作

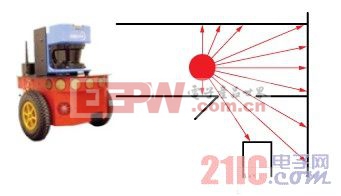
圖 5. 激光映射。
對于室外應(yīng)用,Seekur使用全球定位系統(tǒng)(GPS)進行位置測量(圖 6)。全球定位系統(tǒng)通過至少四個衛(wèi)星的無線電信號傳播時間對地球表面上的位置進行三角測量,精度可達±1 m以內(nèi)。不過,這些系統(tǒng)難以滿足無阻擋 的要求,可能受建筑、樹木、橋梁、隧道及許多其他類型的物體影響。某些情況下,室外物體位置和特性已知(“城市峽谷”),則在 GPS 運行中斷時也可使用雷達和聲納來協(xié)助進行位置估算。即便如此,當存在動態(tài)條件時,例如汽車經(jīng)過或正在施工,效果常常會受到影響。
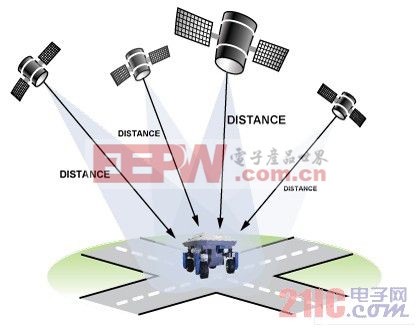
圖 6. GPS 位置檢測。
MEMS 角速率檢測
Seekur系統(tǒng)使用的MEMS陀螺儀可直接測量Seekur關(guān)于偏航(垂直)軸的旋轉(zhuǎn)速率,該軸在Seekur導航參考坐標系內(nèi)與地球表面垂直。用于計算相對駛向的數(shù)學關(guān)系式是固定時間內(nèi)(t1至 t2)角速率測量結(jié)果的簡單積分。

該方法的主要優(yōu)勢之一是連接至機器人機架的陀螺儀可測量車輛的實際運動,而無需依靠齒輪比、齒輪隙、輪胎幾何形狀或表面接觸完整性。不過,駛向估算需要依靠傳感器精度,而該精度取決于偏置誤差、噪聲、穩(wěn)定性和靈敏度等關(guān)鍵參數(shù)。固定偏置誤差轉(zhuǎn)換為駛向漂移速率,如包含偏置誤差ωBE的下列關(guān)系式所示:

偏置誤差可分為兩種:當前誤差 和條件相關(guān)誤差。Seekur系統(tǒng)估算的是未運動時的當前偏置誤差。這要求導航電腦能夠識別未執(zhí)行位置變化命令的狀態(tài),同時還要方便進行數(shù)據(jù)收集偏置估算和校正系數(shù)更新。該過程的精度取決于傳感器噪聲以及可用于收集數(shù)據(jù)并構(gòu)建誤差估算的時間。如圖7所示,Allan方差曲線提供了偏置精度與求均值時間之間的簡便關(guān)系式,進而確定了ADIS16265的關(guān)系式。ADIS16265是一款與Seekur系統(tǒng)目前所用的陀螺儀類似的iSensor®MEMS器件。本例中,Seekur可將20秒內(nèi)的平均偏置誤差減小至0.01°/秒以下,并可通過在約100秒的周期內(nèi)求均值來優(yōu)化估算結(jié)果。
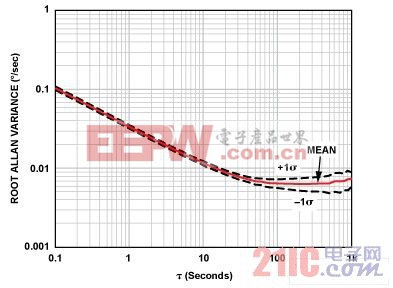
圖 7. ADIS16265 Allan 方差曲線。








評論