20kg級自主水下機器人控制軟件設計與實現

3 軟件實現
3.1 多線程實現
一個進程可有多個線程,使用多線程可提高軟件的執行效率。該控制軟件共有3個線程組成,包括一個主線程、一個導航線程和在成功打開串口后利用API函數CreateThread創建的一個串口操作線程(如圖3所示)。
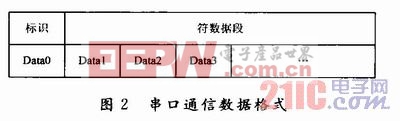
串口操作線程讀取串口數據,并提取有效數據,接著利用函數PostMessage將有效數據分別傳送到主線程和導航線程。主線程將有效數據根據協議進行解包并把數據包中包含的AHRS、數字羅盤、GPS等傳感器和推進器、前艙環境參數等數據顯示到界面上。當使用搖桿控制AUV的運行時主線程每隔0.5 s從USB接口接收數據,并轉換成推進器轉速以及方向舵的方向角信息,且將這些信息發送到串口操作線程寫入串口。
在主線程中創建串口操作線程的代碼如下:
hThread=CreateThread(NULL,0,ThreadProc,(LPVOID)this,0,NULL);
在串口操作線程中將有效數據發送到主線程的代碼如下:
PostMessage(*pDlg,WM_MYMSGl,
(WPARAM)buf,(LPARAM)Length);
3.2 關鍵算法
由于慣性導航系統提供的位置估計精度會隨時間而漂移,所以導航線程采用基于GPS/INS的組合導航算法,用GPS輔助導航,即用GPS信息輔助修正慣導系統的輸出,包括航向角和速度。對AUV的航向角信息修正是通過經典的PID控制算法來實現的,如圖4所示。

設Ji-1,Ji為AUV的2個節點,AUV即A點從Ji-1到Ji點運行。設正北方向矢量為,根據圖5按照下式可計算出角度θ。角度θ計算公式為:![]()










評論