基于時間觸發模式的HBRS控制系統混合調度器方案設計

按照混合調度算法,該9個任務、4個處理器的實時控制系統在各個工作模式下的時序仿真結果如圖3所示,仿真忽略任務上下文切換消耗的處理器資源。根據表3,任務的最大公約數為10 ms,因此時間軸被劃分為周期為10 ms的時間片。本文引用地址:http://www.104case.com/article/160907.htm
令時標間隔為1.5 ms,開發平臺下的HBRS混合定時調度時序如圖4所示,其中空白時間段中處理器處于休眠狀態。
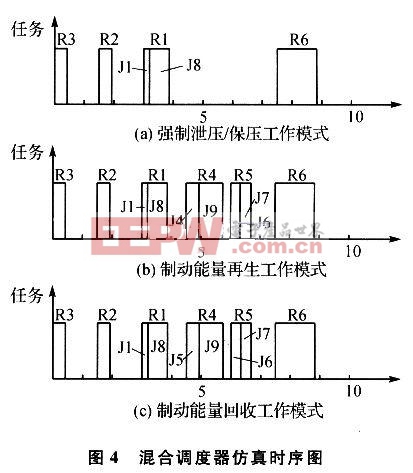
圖4(a)說明了當HBRS電子控制系統在強制泄壓和保壓工作模式時處理器執行任務的時序。此時,處理器根據任務R3和R2采集的車輛工作狀態信息,經任務R1判斷系統的工作模式,若為強制泄壓或保壓工作模式則執行任務R6發出控制命令。
圖4(b)和圖4(c)說明了當HBRS電子控制系統在制動能量再生工作模式和制動能量回收工作模式時處理器執行任務的時序。2個模式的區別在于任務R4 中分別觸發的子任務為J4和J5。任務R1判斷系統工作于制動能量再生工作模式,觸發任務R4查詢計算液壓泵馬達有效排量的驅動電流值并觸發任務R5采集車輛的負荷狀況對驅動電流值修正,通過任務R6發送HBRs系統各電磁方向閥、電磁離合器和液壓泵馬達的驅動命令。
結語
本文應用時間觸發模式設計了液壓式制動能量再生系統的電子控制系統混合調度器,實現了HBRS的基本功能。通過功能模塊劃分、任務劃分和時間序列的設計可以方便地設計時間觸發模式調度器。時間觸發模式設計的電子控制系統具有安全、成本低和程序簡單的特點。











評論