小型紡織繞線恒張力控制系統的研究和設計

以規則IF E=NB and EC=PB then △KP=Z為例,當偏差E為NB、偏差變化率EC為PB時,說明被控量遠遠小于設定值,但以較大的速度減小偏差,因此可保持當前的比例系數,模糊推理輸出為Z。再如規則IFE=PB and EC=PB then △KP=PB,當偏差E為PB、偏差變化率EC為PB時,說明被控量超調很大,而且以較大的速度加大超調,因此應最大幅度的加大比例系數,以達到迅速減小偏差的目的,此時模糊推理輸出為PB。積分系數△KI模糊調節規則和微分系數△KD模糊調節規則以此類推。
3.2.3 Simulink仿真
在Simulink中對系統進行建模和仿真實驗,被控系統為一個時變二階系統,采用Matlab的模糊邏輯工具箱來設計模糊控制器,構建的模糊PID控制系統模型如圖5所示。本文引用地址:http://www.104case.com/article/160871.htm
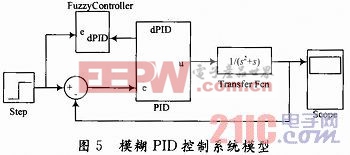
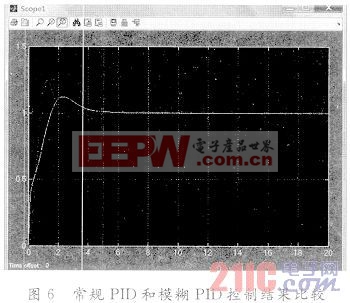
圖6給出了在階躍信號激勵下,常規PID控制和模糊PID控制輸出曲線的比較。由圖6可以看出,要使系統達到穩定,常規PID控制需要14 s以上,模糊PID控制只需要不到8 s。且常規PID控制的超調量也較大,模糊PID控制的穩定值更接近1。模糊PID控制和常規PID控制相比,系統達到穩定的時間更短,可見模糊PID控制方法更具優越性。
4 結語
在紡織繞線恒張力控制研究中,采用模糊理論的方法進行分析,確定了系統的數學模型和模糊控制規則,在Simulink中仿真的結果表明:模糊PID控制對張力波動起了很好的抑制作用。當被控對象參數發生變化時,能夠利用設定的模糊推理方法實時調整PID參數,快速適應被控對象變化,起到更好的控制效果。












評論