小型紡織繞線恒張力控制系統的研究和設計

3.2 自適應模糊PID控制器的設計
PID控制是過程控制中應用廣泛的一種控制規律,具有結構簡單、可靠等優點,對于連續系統的PID控制規律為:
離散系統的PID控制規律為:
常規的PID控制器的參數是固定的數值,而對于參數隨著時間不斷變化的繞線系統,常規PID控制器的精度不是很高,當參數設置不佳時甚至造成系統不穩定,因此,本系統采用模糊PID控制,可在卷繞過程中,在線跟蹤被控過程的動態特性,及時修改參數實現恒張力繞自動化。
模糊PID控制器以3個二維模糊控制器FC1,FC2和FC3的輸入誤差E,誤差變化EC作為輸入,控制量△KP,△KI,△KD作為輸出,分別完成輸入量模擬化、模糊推理運算以及對結果非模糊化過程,不同時刻E和EC對PID參數進行修改,即構成了模糊PID控制器。
3.2.1 輸入輸出量的模糊化
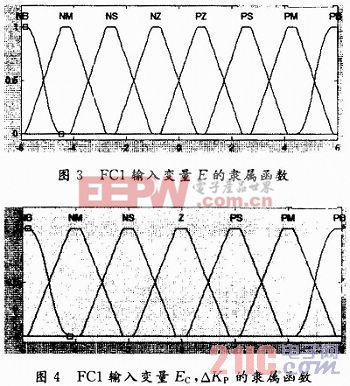
FC1模糊語言變量的設計:設二維模糊推理輸入模糊語言變量為E和EC,模糊論域為[-6,+6],將偏差的模糊語言變量E的語言值設定為8個,即{NB,NM,NS,NZ,PZ,PS,PM,PB}。將偏差變化率的模糊語言變量EC的語言值設定為7個,即{NB,NM,NS,Z,PS,PM,PB}。將輸出模糊語言變量△KP的語言值設定為7個,即{NB,NM,NS,Z,PS,PM,PB}。輸入輸出的隸屬函數分布如圖3,圖4所示。本文引用地址:http://www.104case.com/article/160871.htm
FC2模糊語言變量的設計:將輸入變量E,EC和輸出變量△KI的語言值都設定為7個,即{NB,NM,NS,Z,PS,PM,PB}。
FC3模糊語言變量的設計:將輸入變量E的語言值都設定為7個,即{NB,NM,NS,Z,PS,PM,PB}。將輸入變量EC的語言值都設定為6個,即{NB,NM,NS,PS,PM,PB}。將輸出變量△KD的語言值都設定為7個,即{NB,NM,NS,Z,PS,PM,PB}。
3.2.2 模糊控制規則
為了使模糊規則符合工程上根據系統超調量修正控制器輸出的語言習慣,在這里取實際偏差e為反饋值減給定值,即:e(t)=y(t)-r(t)。其中r(t)為給定輸入量;y(t)單位負反饋系統的輸出量。根據偏差、偏差變化率的不同狀態及PID控制基本原理可設計參數自調節模糊PID控制器FC1的模糊控制規則表如表1所示。FC2和FC3的模糊控制規則表以此類推。













評論