基于數字隨動系統的PWM裝置數學模型分析

若XJ7端三角波為理想的三角波,當UX11(s)>UX11max或UX11(s)UX11min時,運放器A3:A完全工作在飽和區,此時XJ7端三角波信號UXJ7(s)在[-U1,U1]全范圍內,X12端輸出矩形波占空比ρ(s)要么為0,要么為1;當UX11minUX11(s)UX11max時,X12端輸出UX12(s)的占空比ρ(s)與X11端輸入信號UX11(s)之間為線性關系,即為式(17)。
SKJ-II型數字隨動系統中使用了橋式可逆PWM變換器,其供電電源為Us,則輸出電壓Ud(s)與ρ(s)之間的關系為:
Ud(s)=Us[2ρ(s)-1] (18)
SKJ-II型數字隨動系統元件參數:R17=22 kΩ,R20=20 kΩ,R21=1 MΩ,經示波器測量圖4所示X12端飽和輸出電壓±11.6 V,三角波幅值范圍為[-5.15 V,5.15 V],代入式(17)可得:
ρ(s)=0.5-0.092 4UX11(s) (19)
通過等效變換,PWM裝置的傳遞函數Ud(s)=-0.184 8UX11(s),相當于一個反向比例放大環節。
3 實驗驗證及公式修正
基于SKJ-II型數字隨動系統,就PWM控制器電路和H橋電路的模型分別進行實驗驗證。實驗中為降低難度不直接用力矩電機做實驗,采用100 Ω滑線變阻器作為負載。輸入信號UX11(s)由系統前端電流調節器的輸出決定,H橋電路的輸出Ud(s)為X16端與X17端之差,輸出Ud(s)的占空比記為ρ(s)。測量X11端輸入信號UX11(s)分別為1 V,2 V,3 V,-1 V,-2 V,-3 V時,輸出X16端與X17端的波形數據,如表1所示。
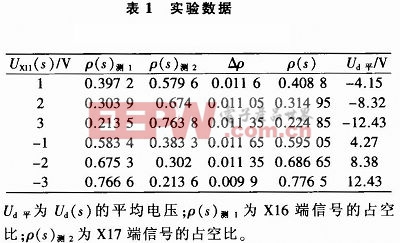
ρ(s)修正參數定義為:△ρ=[1-ρ(s)測1-ρ(s)測2]/2,則修正后的占空比ρ(s)=ρ(s)測1+△ρ。一方面,假設GPWM(s)是PWM控制器傳遞函數,則:
ρ(s)=0.5+GPWM(s)UX11(s) (20)
將上式變換可得:GPWM(s)=[ρ(s)-0.5]/UX11(s)。根據表1可得:當UX11(s)=1 V時,GPWM=-0.091 2;當UX11(s)=2 V時,GPWM=-0.092 5;當UX11(s)=3 V時,GPWM=-0.091 8;當UX11(s)=-1 V時,GPWM=-0.095 1;當UX11(s)=-2 V時,GPWM=-0.093 3;當UX11(s)=
-3 V時,GPWM=-0.092 2。
另一方面,電源電壓為Us時,Ud(s)=2Usρ(s)-Us。但實際上H橋還要考慮開關管的管壓降,記△U為管壓降。當電源電壓為Us’時,則:Us=Us’-△U。那么,Ud(s)=2Usρ(s)-Us可以表示為:
Ud(s)=[2ρ(s)-1](Us’-△U) (21)

pwm相關文章:pwm原理










評論