基于自抗擾控制器的異步電機變頻調速系統

4.4 實驗結果對比研究
變頻器設定為矢量控制方式。初始速度給定為200 r·min-1,在40 s后,速度給定為周期60 s,n從200~500 r·min-1變化的三角波得到系統的閉環響應。由圖6可知,ADRC控制方式下的跟隨性能明顯優于常規PID控制。
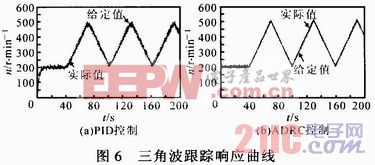
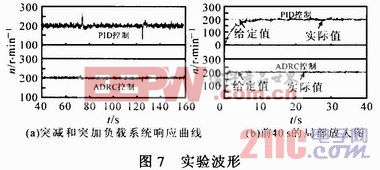
圖7a示出兩種控制下系統響應曲線。由圖可知,ADRC控制下系統的魯棒性和抗干擾性優于PID控制。圖7b示出圖6前40 s的局部放大圖。
由圖可知,ADRC控制方式下的動靜態性能明顯優于常規PID控制。
5 結論
針對PLC變頻調速系統的控制性能需進一步提高的問題,簡要介紹了變頻調速系統的數學模型,設計了一種基于自抗擾控制器的異步電機變頻調速系統。與傳統線性PID控制方法相比,采用自抗擾控制器的變頻調速系統運行性能得到了顯著提升。在保證較快的動態響應的前提下,對ADRC進行了優化,減少了控制器參數,減小了算法計算量,增強了控制器的工程實用性。
矢量控制相關文章:矢量控制原理










評論