擬人機器人上肢多關節控制參數整定

1.4 電機數學模型的參數確定
從前面的理論分析得到了一個電機的開環控制時域模型,可以將實際測量得到的電機的開環數據代入式(1),求出電機模型中的參數a,b,c。其中a=522 284.126 112 083;b=1 282.297 371 441;c=0.084 348 857;從而得到新的曲線,如圖3所示,為便于比較同時繪出了
電機實際響應曲線。
由圖3可看出理論計算得到的曲線與電機實際曲線的擬合度非常好,說明采用式(1)作為電機開環函數完全可行。控制參數:a=522 28 4.126 112 083;b=1 282.297 371 441;c=0.084 348 857可以作為電機的仿真參數。因此擬人機器人手部電機開環系統的時域響應函數為:

2 電機PID閉環控制系統仿真
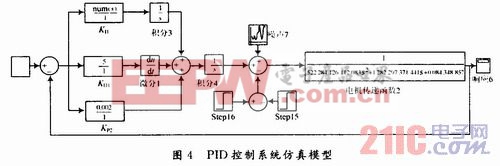
從以上分析可以看出,電機開環系統很容易受到干擾。因此在開環的基礎上,考慮構造電機的閉環控制系統。由于PD控制系統存在靜差,PI控制系統響應時間長,DI控制系統穩定性不好,鑒于此,下面考慮PID控制,其系統仿真模型如圖4所示。
該系統的控制效果基本上令人滿意,圖5是部分控制效果模擬。
由此可見,PID控制很好地結合了PI、PD控制系統的優點,避免了他們的缺陷,使系統最終獲得了很高的控制精度、更快的響應速度、更突出的控制穩定性,因此最終選擇PID作為機器人上肢DC電機的閉環控制系統。通過對比可以看出,該系統比較完美,超調量幾乎沒有,響應時間也很短,抗干擾能力也很強。
3 結語
通過以上建模和仿真,找到了一個合適的控制方法,即PID控制,并且經過調節得到的一組較好的PID控制參數為KP=0.002;KD=5;KI=0.000 000 09。按照以上參數,系統最終獲得了很高的控制精度、更快的響應速度、更突出的控制穩定性,幾乎能夠完全抵抗外部的干擾。該仿真對擬人機器人手部控制節點的設計具有很重要的指導作用,同時該方法具有很強的普遍性,對于一般的直流電機的閉環控制也有一定的借鑒意義。










評論