模塊化機(jī)器人嵌入式多核主控制器設(shè)計(jì)

5 實(shí)驗(yàn)及結(jié)果分析
實(shí)驗(yàn)系統(tǒng)包括基于FPGA的嵌入式多核主控制器、機(jī)器人關(guān)節(jié)控制器以及單臂六自由度機(jī)器人等。運(yùn)動(dòng)學(xué)正解運(yùn)算性能時(shí)間對(duì)比如表2所列。在保證控制準(zhǔn)確、有效的前提下分別采用單Nios II軟核處理器與協(xié)處理器進(jìn)行運(yùn)動(dòng)學(xué)正解運(yùn)算。單Nios II軟核處理的耗時(shí)約為2900
μs,而多核主控制器的協(xié)處理器只需要約10μs的時(shí)間。可以看出在相同系統(tǒng)時(shí)鐘下,協(xié)處理器進(jìn)行運(yùn)動(dòng)學(xué)正解比單Nios II軟核處理器的效率提升了兩個(gè)數(shù)量級(jí)。
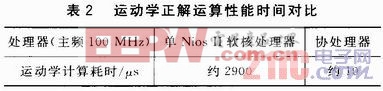
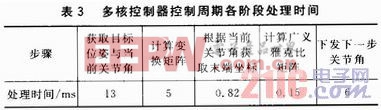
表3列出了一個(gè)控制周期(多核主控制器采用路徑規(guī)劃算法控制機(jī)器人從空間中一點(diǎn)到下一點(diǎn))內(nèi)各階段的處理時(shí)間,整個(gè)控制周期所需時(shí)間約為24.97 ms,比之前單獨(dú)采用Nios II軟核處理器控制的100ms節(jié)約了大概3/4的時(shí)間。而且,用于CAN總線通信及數(shù)據(jù)采集的部分(獲取目標(biāo)位姿與當(dāng)前關(guān)節(jié)角、下發(fā)下一步關(guān)節(jié)角)所占用的時(shí)間為整個(gè)周期的76%。由此可以看出,該設(shè)計(jì)能極大地提高系統(tǒng)處理能力,并能夠很好解決嵌入式控制器運(yùn)算能力對(duì)模塊化機(jī)器人控制系統(tǒng)的約束問(wèn)題。
6 結(jié)論
本文對(duì)基于FPGA的模塊化機(jī)器人嵌入式多核主控制器進(jìn)行了研究,重點(diǎn)討論了路徑規(guī)劃方法,分析了NiosII軟核體系結(jié)構(gòu);并對(duì)協(xié)處理器結(jié)構(gòu)設(shè)計(jì)、片上結(jié)構(gòu)設(shè)計(jì)做了詳細(xì)介紹。最終實(shí)驗(yàn)結(jié)果也表明了該設(shè)計(jì)的可行性以及控制的快速性。在更改機(jī)器人結(jié)構(gòu)的時(shí)候,只需要分析連桿坐標(biāo)系,獲得D-H參數(shù)并傳遞給協(xié)處理器,該多核主控制器仍能可靠有效地工作。
linux操作系統(tǒng)文章專題:linux操作系統(tǒng)詳解(linux不再難懂) 電容式觸摸屏相關(guān)文章:電容式觸摸屏原理





評(píng)論