無人機航空遙感平臺機載作業控制系統設計

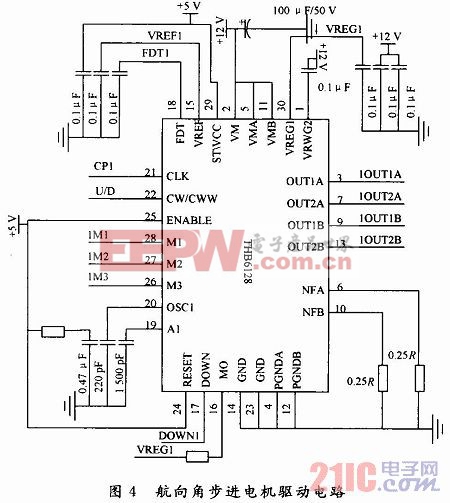
THB6128是高細分兩相混合式步進電機驅動專用芯片,通過單片機輸出控制信號,即可設計出高性能、多細分的驅動電路。其特點為雙全橋MOSFET驅動,低導通電阻Ron=0.55 Ω,最高耐壓36 V,大電流2.2 A(峰值),多種細分可選,最高可達128細分,具有自動半流鎖定功能,快衰、慢衰、混合式衰減3種衰減方式可選,內置溫度保護及過流保護。圖4為航向角步進電機驅動電路,俯仰角、橫滾角步進電機驅動與之相同。圖中CP1與U/D分別為單片機給出的驅動脈沖與電機運行方向控制信號。M1,M2,M3為電機驅動細分數選擇信號輸入,由撥碼開關人為控制。FDT1與VREG1分別為衰減模式選擇電壓與電流控制電壓輸入端。當3.5 VFDT15 V時為慢衰減模式;當1.1 VFDT13.1 V時為混合衰減模式;當FDT10.8 V時為快衰減模式。調整VREG1端電壓即可設定步進電機驅動電流值。電流值:
Iout=(VREF/5)×(1/Rs)
式中Rs為NFA(B)外接檢測電阻。本系統中Rs固定為0.25 Ω,FDT1與VREF1均可調。本文引用地址:http://www.104case.com/article/160475.htm
2.4 CCD/相機驅動電路
CCD/相機驅動由單穩態觸發器74LS221和光耦合器P521實現。74LS221既可以下降沿觸發也可上升沿觸發,且都可以禁止輸出。其輸出的脈寬通過內部補償獲得而不受外部電壓和穩定影響,在大多數應用中,脈寬只由外接的時控元件決定。脈寬tw(out):
tw(out)=CextRextln 2≈0.7CextRext









評論