除塵競賽機器人及其控制策略研究

角度控制的流程分為以下4個步驟,控制算法實現的程序框圖如圖9所示。本文引用地址:http://www.104case.com/article/160450.htm
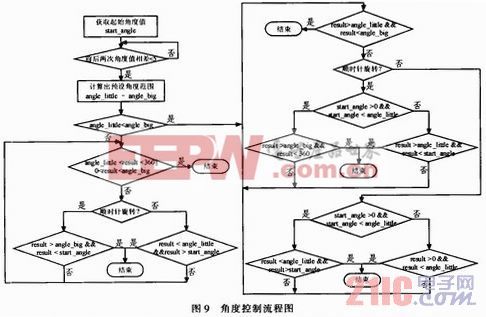
1)循環獲取起始角度信息,當前后兩次獲取信息絕相差小于5°時,得到穩定的起始角度值start_angle。
2)根據當前的角度值start_angle和需要旋轉的角度值,計算得到預設的角度值set_value。
為了避免預設角度值在獲取時被錯過的情況發生,可以在預設角度值的基礎上進行5°的增幅,獲得預設角度范圍angle_little-angle_ big,當angle_littleangle_big說明角度范圍沒有經過360°-0°度的突變,否則角度范圍存在突變。
3)當angle_littleangle_big時,機器人的預設角度范圍如圖7中①,因為機器人根據相應的方向設定進行旋轉時,存在越過360°~0°的突變,所以又將除預設范圍外的部分分別化為②和③,在程序中將當前的角度值保存為result。
當機器人順時針旋轉時,滿足以下一個條件即可判斷為機器人達到預設角度值:
a)當前角度值result在預設角度范圍內。
b)當機器人的起始位置start_angle在圖7中區域②中,而當前位置result在在圖中7區域③中。
c)當機器人的起始位置start_angle在圖7中區域③中時,而當前位置result>angle_little并且resultstart_angle。
當機器人逆時針旋轉時。滿足以下其中一個條件即可判斷為機器人達到預設角度值:
a)當前角度值result在預設角度范圍內。
b)當機器人的起始位置start_angle在圖7區域②中,而當前位置resultangle_little并且result>start_angle。
c)當機器人的起始位置start_angle在圖7區域③中時,而當前位置result在圖7區域②。
4)當angle_littleangle_big時,機器人的角度預設范圍經過360°-0°的突變值,為了區別變化,如圖8要將預設區間分為①和②兩個區間進行考慮,將剩余的區域化為③。然后機器人根據相應的方向設定進行旋轉,并將當前的角度值保存為result。
當機器人順時針旋轉時滿足以下其中一個條件即可判斷為機器人達到預設角度值:
a)當前角度值result在圖8區域①或區域②其中一個預設角度范圍內。
b)當機器人的起始位置start_angle在圖8區域③中,而result>angle_big并且resultstart_angle。
當機器人逆時針旋轉時滿足以下其中一個條件即可判斷為機器人達到預設角度值:
a)當前角度值result在圖8區域①或區域②其中一個預設角度范圍內。
b)當機器人的起始位置start_angle在圖8區域③中,而resultangle_little并且result>start_angle。
4 結束語
將該控制策略用于控制機器人轉角,可靠性和穩定性得到了極大的提高,成功率可達到100%,完全可以滿足競賽的要求。在此基礎上設計的除塵競賽機器人具有成本低、可靠性高的特點,在第四屆江蘇省機器人大賽除塵比賽中,除塵面積覆蓋率達到80%以上,并取得一等獎。










評論