除塵競賽機器人及其控制策略研究

3.1 路徑規劃
為了使機器人的遍歷面積達到最大化,要對其運行路徑進行合理的規劃。為此,將場地劃分為圖中的4個房間,機器人的運行路徑為1->2->3->4->3->1。機器人運行策略的流程如圖6所示。本文引用地址:http://www.104case.com/article/160450.htm
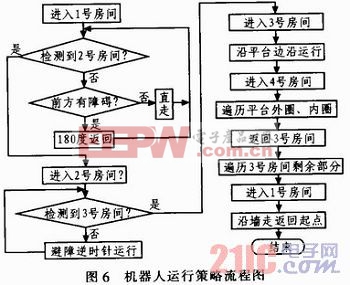
機器人的運行流程可以分為6個步驟:
1)機器人在1號房間內進行折返式遍歷,從起點出發向圖中左方前進,遇到擋板180°返回,如此反復,直到檢測到2號房間門口的黑線為止,這樣可以確保1號房間的遍歷面積達到最大。
2)機器人進入2號房間后,以圓柱型障礙物為中心,逆時針方向運行一圈即可達到最大遍歷面積。
3)機器人從2號房間出來進入3號房間時,由于4號房間是凸出的平臺,可以直接沿4號房間和斜坡的邊沿運行,進入4號房間,3號房間剩余的面積可以在返回時進行遍歷。
4)由于4號房間是平臺,且必須遍歷平臺的三分之一以上的面積,4號房間的遍歷面積才有效,所以機器人在平臺上遍歷兩圈,首先,機器人沿著墻壁和平臺邊沿在平臺上進行外圈的遍歷,然后在第二次遇到相應的墻壁和平臺邊沿時,進行適當的后退,進行內圈的遍歷達到較大的遍歷面積。
5)機器人從平臺下來以后再次進入房間3,可以根據墻壁和障礙物的信息,對步驟3中剩下的面積進行遍歷。
6)采用沿墻走策略安全回到起始點。
3.2 轉角控制
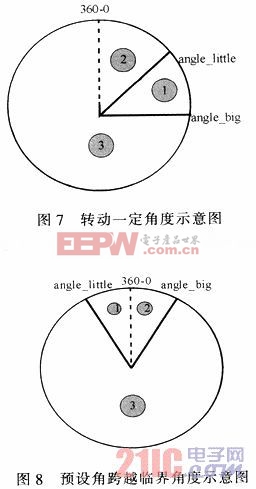
電子指南針為機器人的運行提供角度信息,在實際應用中,除塵機器人轉動的角度有45°、90°、180°三種大角度。電子指南針模塊輸出0°~360°的角度信息,考慮到競賽場地方向的不確定性,通常采用相對角度而非絕對值。即采用獲取當前的角度值,然后預設要轉過的角度,對采集到的角度信息進行查詢比較,當到達或超過預設角度時就停止轉角工作,進入下一步的任務。在調試過程中,發現機器人在轉角的過程中會出現連續打轉的非正常情況。經過分析研究發現,主要原因是信息獲取的抖動以及環境的影響,為此,將具體的預設角度擴展為一個范圍,一般情況下機器人轉動一定角度的原理如圖7所示。將具體的預設角度擴展為一個范圍又引入了新的問題,這是預設角度范圍存在從360°到0°突變,也就是經過360°(0°)的臨界點造成的,預設角跨越臨界角度示意圖如圖8所示。










評論