個人衛生護理機器人控制部分的設計與實現

2.8 網絡模塊
個人衛生護理機器人在工作時可以通過以太網向上位機傳送數據,這些數據主要是護理機的工作狀態和洗澡者的生命體征數據及報警信號。此模塊采用了一款獨立的UART,TCP/IP協議模塊來完成數據的轉換和雙向傳輸。通過對生命體征監測部分的數據交流以得到使用者的心率、血氧飽和度和脈搏信息。經過處理,將這些信息和其他的機器狀態報警信號上傳至上位機。該模塊與主控芯片以串口的方式通信,節約了I/O口。
3 系統軟件設計
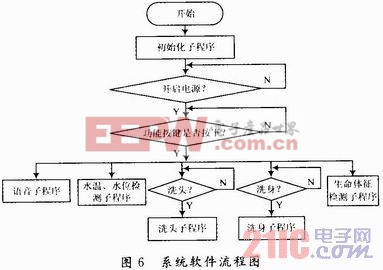
系統軟件采用模塊化設計,由主程序、初始化子程序、溫度檢測程序、中斷子程序、延時子程序等組成,通過主程序分別調用各子模塊完成相應的功能。其軟件系統總體框圖如圖6所示。本文引用地址:http://www.104case.com/article/160428.htm
4 結語
本文介紹了基于STC89C52的個人衛生護理機器人的設計與實現方法,該系統能夠完成自動洗浴的功能,為行動不便的人提供了洗頭、洗澡、干身、按摩等服務,較大幅度地減少了為這些人服務的勞動強度。該系統可廣泛應用于醫院、養老院和需要該類服務的家庭。










評論