利用傳感器檢測智能車加速度及速度全面解析方案

1 引言
本文引用地址:http://www.104case.com/article/160360.htm智能汽車是汽車電子、人工智能、模式識別、自動控制、計算機、機械多個學科領域的交叉綜合的體現,具有重要的應用價值。智能尋跡車是基于飛思卡爾MC9S12DGl28單片機開發實現的,該系統采用CCD傳感器識別道路中央黑色的引導線,利用傳感器檢測智能車的加速度和速度,在此基礎上利用合理的算法控制智能車運動,從而實現快速穩定的尋跡行駛。
2 硬件系統設計
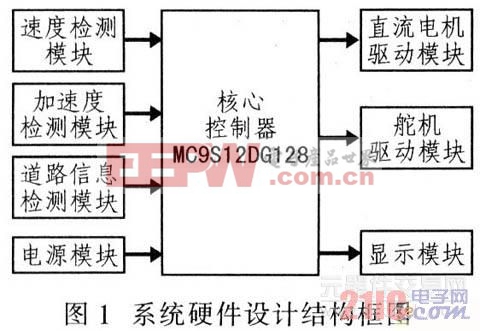
該系統硬件設計主要由MC9S12DGl28控制核心、電源管理模塊、直流電機驅動模塊、轉向舵機控制模塊、道路信息檢測模塊、速度檢測模塊和加速度檢測模塊等組成,其結構框圖如圖1所示。
2.1 主控制器模塊
智能車的控制核心為MC9S12DGl28。MC9S12DGl28是飛思卡爾公司生產的一款16位單片機,片內總線時鐘可達到25 MHz;片內資源包括8 K RAM、128 K Flash、2 K EEP-ROM;SCI,SPI,PWM和串行接口模塊;脈寬調制模塊(PWM)可設置成4路8位或2路16位,邏輯時鐘選擇頻率脈寬:2個8路10位A/D轉換器,增強型捕捉定時器并支持背景調試模式等。
2.2 電源管理模塊
該系統設計采用7.2 V/1 800 mA鎳鎘電池供電,7.2 V電壓經過BMlll7—5穩壓后得到5 V電壓,向單片機、紅外傳感器和加速度傳感器供電。5 V電壓經MAX8715升壓后得到12 V電壓,向CCD圖像傳感器供電:7.2 V電壓經二極管降壓得到約6 V的電壓來驅動舵機;電機驅動器MC33886則直接由電源供電。
2.3 道路信息檢測模塊
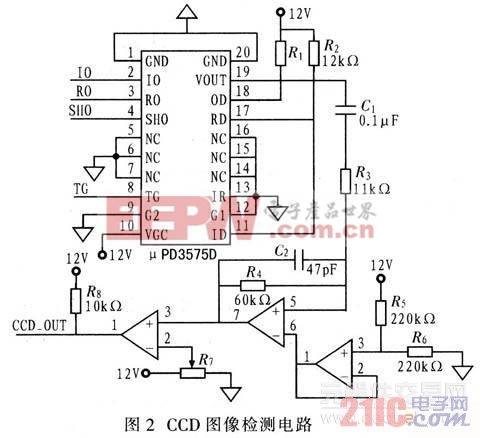
該系統設計使用NEC公司的線陣CCDμPD3575D檢測賽道信息。該器件可工作在5 V驅動(脈沖)和12 V電源條件下。μPD3575D的驅動需要4路脈沖,分別為轉移柵時鐘φIO、復位時鐘φRD、采樣保持時鐘φSHO和傳輸門時鐘φTG。系統設計由外圍電路直接產生CCD驅動時鐘,采用計數器和觸發器專門設計時序電路,產生轉移柵時鐘φIO、復位時鐘φRO、采樣保持時鐘φSHO,單片機只需產生一個幀同步信號(傳輸門信號φTG)與外圍時序電路保持同步即可。μPD3575D輸出的是模擬信號,將采集圖像傳輸至單片機,一般需對μPD3575D輸出信號進行A/D轉換,考慮到設計實際上只需要區分黑色和白色,μPD3575D對這兩種輸出信號差異較大,因此,將μPD3575D輸出信號放大后直接使用一個比較器對信號二值化處理,如圖2所示。由單片機檢測二值信號的跳變時間,便可計算出黑線位置,從而進一步縮短單片機在CCD上所消耗的時間。











評論