無線傳感器網絡差分修正定位算法的改進

2.2 算法實現過程
基于上面提出的改進差分修正算法,其實現的步驟如下:
(1)信標節點周期性地發送自身信息:節點ID、自身位置信息。
(2)未知節點在收到信息后,對同一信標節點的RSSI求均值。
(3)當未知節點接收到一定數量的信標節點的信息后,不再接收信息。未知節點根據RSSI從強到弱的順序,建立RSSI值與節點到信標節點距離的映射。建立以下三個集合。
信標節點集合:B_set={b1,b2,…,bm};
未知節點到信標節點的距離集合:D_set={d1,d2,…,dm},d1d2…dm;
信標節點的位置集合:P_set={(x1,y1),(x2,y2),…,(xm,ym)};
(4)選取RSSI值大的前幾個信標節點進行定位計算。在這里按照本文改進的算法,選取未知節點所在最小區域的四個信標節點用于定位。用改進的差分修正定位算法對這四個信標節點分別進行差分定位,利用式(8)求出未知節點的坐標(x,y)。
(5)計算定位誤差
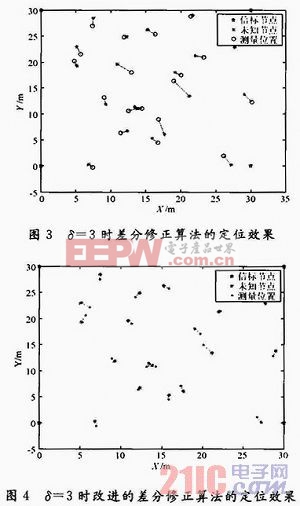
3 仿真結果
在Matlab平臺上,分別對差分定位算法和改進的差分定位算法進行仿真。仿真條件是在一個30 m的正方形區域內,傳播路徑損耗模型選擇經典的自由空間模型和對數一常態模型。在該區域的四個頂點,分別放函數來生成,在該區域內隨機分布,一共生成20個未知節點。然后根據RSSI與距離的關系,由式(4)生成RSSI數據,這里b取30,n取2,并在數據中添加均值為0,方差δ為3和7的高斯噪聲,作為RSSI的隨機分量,以模擬實際環境中反射、多徑等帶來的影響。按照上述方法,在兩種情況下分別對兩種算法進行仿真運算,得出未知節點的測量位置。兩種算法的仿真結果與對比如圖3~圖6所示。本文引用地址:http://www.104case.com/article/160349.htm












評論