智能小車自動(dòng)糾偏與避撞的實(shí)現(xiàn)

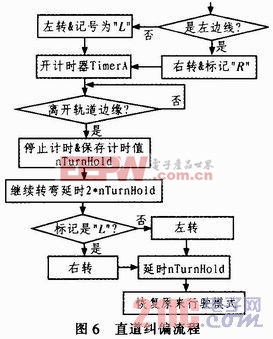
直道糾偏的同時(shí)開啟TimerA計(jì)時(shí);小車離開跑道邊緣時(shí)關(guān)閉TimerA,保存計(jì)時(shí)值:nTurnHold。
繼續(xù)轉(zhuǎn)彎,時(shí)長(zhǎng)為2*nTurnHold(繼續(xù)保持2*nTurnHold轉(zhuǎn)彎是為了將小車調(diào)整向跑道中間);反向轉(zhuǎn)彎,時(shí)長(zhǎng)為nTurnHold(反向轉(zhuǎn)彎是為了糾正小車方向);恢復(fù)原來的行駛模式。具體流程圖如圖6所示,先判斷接近的是左或右邊線,做好左右轉(zhuǎn)標(biāo)記,然后以直道兩次糾偏算法進(jìn)行計(jì)算,最后根據(jù)左右轉(zhuǎn)標(biāo)記進(jìn)行反方向糾偏。本文引用地址:http://www.104case.com/article/160343.htm
3.2 彎道糾偏算法
采用小車兩邊轉(zhuǎn)速不同、輔以延時(shí)的方法來實(shí)現(xiàn)轉(zhuǎn)彎,因此延時(shí)時(shí)間是關(guān)鍵。然而,通常在過轉(zhuǎn)彎標(biāo)志線時(shí),車身與線不垂直且角度也不固定,如圖7所示。這將造成無法確定一個(gè)固定的延時(shí)值。為此,采用彎道糾偏的方法,確保小車過彎后姿態(tài)可控,該方法流程圖如圖8所示。其中,每輛車配有兩塊對(duì)稱分布于車頭兩邊的轉(zhuǎn)彎線檢測(cè)模塊,當(dāng)其中有一塊檢測(cè)到轉(zhuǎn)彎線時(shí),先判斷是左還是右,如果是左邊先檢測(cè)到線則符號(hào)為“+”,否則為“-”,然后立刻打開MSP430的計(jì)時(shí)器TimerA,計(jì)算兩塊傳感器檢測(cè)到轉(zhuǎn)彎線的時(shí)間差。根據(jù)符號(hào)是“+”或“-”,將上面得到的時(shí)間差以一定比例加/減到固定延時(shí)時(shí)間上,這個(gè)比例無準(zhǔn)確計(jì)算方法,實(shí)際數(shù)值主要根據(jù)跑道的摩擦力,小車速度等客觀條件確定,進(jìn)而得到最終的時(shí)間參數(shù)(即轉(zhuǎn)彎時(shí)長(zhǎng)nVeerTime),轉(zhuǎn)彎函數(shù)調(diào)用此參數(shù)。這樣一種“負(fù)反饋式修正”的方法,能使小車在轉(zhuǎn)彎后基本平行于跑道,且去向跑道中間。

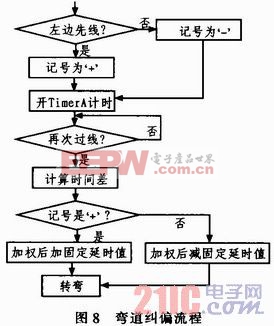
轉(zhuǎn)彎時(shí)長(zhǎng):nVeerTime;左、右傳感器探測(cè)到轉(zhuǎn)彎時(shí)間差:nDiffValue;轉(zhuǎn)彎固定延時(shí)值:nStaticTime;比例系數(shù):fRatio。
nVeerTime=nStaticTime+nDiffValue*fRatio
超車時(shí)需要多次轉(zhuǎn)彎,因而超車標(biāo)志區(qū)設(shè)置多條黑線,可以多次調(diào)整,將保證小車進(jìn)入超車區(qū)后的姿態(tài)最理想。








評(píng)論