利用電磁導航的AGV設計

2.2 傳輸數據的編碼和解碼
由于單片機所傳輸的數據只能以字符的ASCII傳輸,所以需要對傳輸的數字信號進行編碼傳輸。比如傳輸數據是1,而a的ASCII值是65,故可將1+64=65,即1的值等于a(65),接收端接到字符a的ASCII值65,將65-64=1,即進行了譯碼。以此類推,2當作b(66),3當作c(99)。對0~9十個數分別等價于@,A,B,C,D,E,F,G,H,I。
設計中由于ASCII在傳輸時,是作為二進制碼串行輸出,每一位的持續時間是100μs,傳輸一個ASCII值至少需要800μs,因此為了不讓接收端亂碼,經過測試得到發送兩個ASCII值之間時間必須大于1 200μs。與此同時,在發送一組數據時,必須先發送一個起始位。在編程時,為了不使接收數據發送錯誤,對接收數據的首位進行校驗,如果首位與發送數據首位一致,這就說明該組數據有效,首位字符是是先設置好了的,二者保持一致。
2.3 上位機及通信
在上位機端以VB為開發工具,利用其豐富的圖形界面,能夠實現轉速等信息的實時顯示,并且可以很方便地利用設置的按鈕通過無線方式發出指令。本文引用地址:http://www.104case.com/article/160297.htm
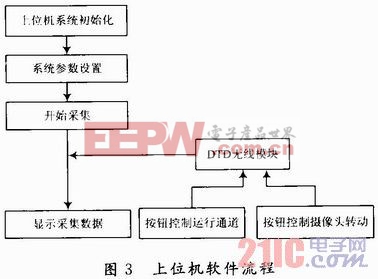
通過電腦實現了一對多的通信方式,既可以實現對道路選擇端的控制,又可以實現對小車上面舵機的控制。上位機軟件流程如圖3所示。
3 結語
對于AGV來說,保證運動的可靠性、精確性是非常重要的,它涉及到機構設計、傳感器技術、自動控制及軟件科學等很多方面,是一項比較復雜的系統性研究工作。該設計中重點研究了小車的各種控制算法,將其運用到小車的控制中,小車貼著鋪設的軌道運行平穩,取得了較好的效果。小車進行自主導航的時候,外界環境對它的干擾很小。除此外,AGV還能在夜間獨立的運行,攝像頭還能較清晰地拍攝夜間圖像。實驗表明,該AGV能廣泛應用于無人搬運、無人環境監控、危險環境監控等場合。系統實用、經濟、可靠,因此該AGV具有很大的市場推廣價值。






評論