利用電磁導航的AGV設計

1.3 無線傳輸模塊
本設計采用DTD462無線傳輸模塊,西安達泰公司生產的DTD462無線傳輸模塊,廣泛地運用于無線數據傳輸領域。它能提供高穩(wěn)定,高可靠,低成本的數據傳輸,還提供了豐富的外圍接口,并具有安裝維護方便,繞射能力強,組網結構靈活,范圍覆蓋寬等特點。采集數據的實時傳送,滿足客戶對于數據實時性,準確性的要求。此類無線傳輸方式有高可靠性、體積小、重量輕,傳輸距離30~300 m等特點。系統(tǒng)攝像頭采集到的視頻信息通過DTD462嵌入式無線數據傳輸方式,傳輸到接收端在上位機軟件中顯示監(jiān)視圖像。
1.4 電機控制模塊
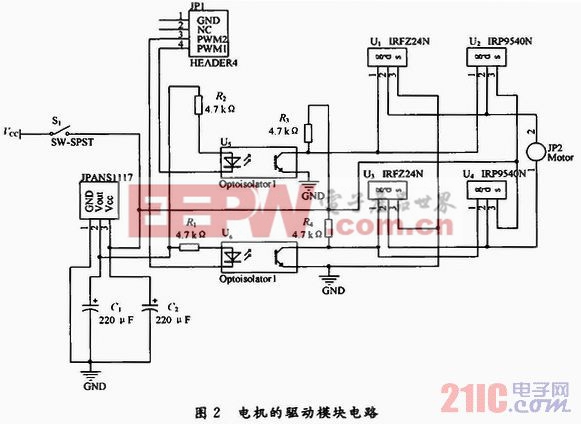
在電機控制模塊的設計中,使用IRFZ44N和IRF9540N搭建了H橋電路,能夠實現電機的正轉和反轉。用光耦對單片機的輸出調制信號進行隔離輸出,能有效地消除電機轉動對單片機的工作干擾。電機的控制模塊電路如圖2所示。調試過程:當PWM2的輸出為高電平,PWM1為低電平時,U5輸出低電平,U6輸出高電平;U1的d,s導通,d接地,U2的d端接地,而U3的d,s截止,U4的d,s導通,輸出高電平,因此電機正轉;反之,若PWM2的輸出為低電平,PWM1為高電平時,電機反轉。小車的轉向和攝像頭的轉動是用2個舵機來分別驅動的。通過編程用軟件輸出標準PWM信號來驅動舵機,一般PWM控制信號的周期為20 ms。當給舵機輸入脈寬為0.5 ms,即占空比為0.5/20=2.5%的調制波時,舵機右轉90°;當給舵機輸入脈寬為1.5 ms,即占空比為1.5/20=7.5%的調制波時,舵機靜止不動;當給舵機輸入脈寬為2.5 ms,即占空比為
2.5/20=12.5%的調制波時,舵機左轉90°。可以推導出舵機轉動角度與脈沖寬度的關系計算公式為:
t=1.5±θ/90° (3)
式中:t為正脈沖寬度(單位:ms);θ為轉動角度。注意當左轉時取加法計算,右轉時取減法計算結果。本文引用地址:http://www.104case.com/article/160297.htm
2 系統(tǒng)軟件設計
2.1 控制算法
該設計重點是研究以下的控制算法,即平均值濾波算法,位置加權和PID算法。
平均值算法是對電感獲取的信號進行放大檢波之后,累加多次,在取平均值,可以有效去掉干擾的影響。
![]()
式中:get_ad[i]表示第i次取得的ad值;n表示取ad的次數位置加權就是對電磁傳感器的ad平均值進行位置加權,獲得小車的位置。小車的位置在[10,110]范圍內變化,具體計算如式(5)所示:
position=(110*ad_result[0]+10*ad_result[1])/(ad_result[0]+ad_result[1]) (5)
式中:ad_result[0]表示其中一路輸入信號的平均值;ad_result[1]表示另一路輸入信號的平均值;position即加權后的位置值。
PID算法是根據position算出某一時刻的位置偏差,再對偏差進行PID的運算,從而得到舵機的轉角。
duoji=1155+KP*error[1]+KI*(error[1]+error[0])+KD*(error[1]-erroe[0]) (6)
式中:error[1]是此時刻的偏差;error[0]是上一時刻的偏差;KP,KI,KD分別是比例系數、積分系數和微分系數。






評論