一種差速驅動小車曲線行走方法

3.2 雙圓弧擬合曲線
給定曲線
在理論曲線上依據需要的精度選擇列表點,并計算出每點處的曲率半徑,根據其式(6)判斷其凹凸性,再對以下兩種情況進行擬合:
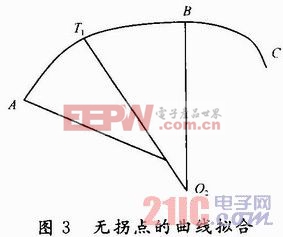
(1)所需擬合曲線段內沒有拐點
根據式(6),若所需擬合的曲線段的兩端點處的曲率半徑皆為同號,即認為曲線段內沒有拐點,如圖3所示。本文引用地址:http://www.104case.com/article/160260.htm
依據小車實際運動狀況,在具體擬合時,提出如下擬合要求:
①擬合圓弧必須過列表點;
②列表點兩側圓弧在列表點處光滑相切,且切線斜率與理論曲線在列表點處相等;
③兩相鄰列表點之間的兩段圓弧在圓弧與圓弧交接點處相切;
④曲線段內過列表點的兩側圓弧半徑應盡量與理論曲線在列表點處的曲率半徑接近。
在給定曲線上取列表點A,B,C,…,記它們的坐標分別為(xA,yA),(xB,yB),(zC,yC),…,有:
![]()
根據式(7)可以求出各列表點處的法線斜率角θA,θB,θC,…,根據式(6)可以求出曲率半徑ρA,ρB,ρC,…,由這兩組數據可以求出理論曲線過列表點的各曲率中心的坐標值。
對于曲線段AB,用![]() 兩段圓弧去擬合曲線段AB,圓弧
兩段圓弧去擬合曲線段AB,圓弧![]() 的圓心分別在O1和O2,則半徑分別為O1A和O2B。O1和O2的坐標分別為(X1,y1)和(x2,y2),為滿足之前提到的第①個和第②個要求,應滿足關系式:
的圓心分別在O1和O2,則半徑分別為O1A和O2B。O1和O2的坐標分別為(X1,y1)和(x2,y2),為滿足之前提到的第①個和第②個要求,應滿足關系式:

為滿足上述第③個要求,應滿足以下關系式:
![]()
聯立式(8)、式(9),含有4個未知數x1,y1,x2,y2,但只有3個方程,故不能求解。為滿足上述第④個要求,以x1為優化變量,以(|ρA|-O1A)2+(|ρB|-O2B)2為目標函數,于是雙圓弧擬合問題就轉化為以這3個方程為等約束條件,使目標函數(|ρA|-O1A)2+(|ρB|-O2B)2趨于最小的優化問題。具體過程是:以理論曲線過A點的曲率中心的x坐標作為x1的初始值,應用優化算法,優化x1,使得目標函數趨于最小,最終得到的(x1,y1)和(x2,y2)就是用來擬合曲線段的最佳兩個圓弧的圓心坐標。








評論