一種差速驅動小車曲線行走方法

由圖2可知,Oc是小車的速度瞬心,在低速運動時忽略橫滑影響,根據運動學的知識可知C點的速度VC的大小為:
VC=(V1+V2)/2 (1)
假設小車車體的角速度為ω,如圖2所示的情況為做順時針運動,因此有:
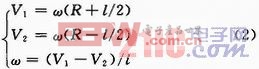
根據剛體平動原理,小車在任意時刻的運動都可以看成是繞車體瞬心OC的轉動,轉動半徑R為:
由V1,V2之間的三種關系決定了差速驅動小車的三種運動方式:
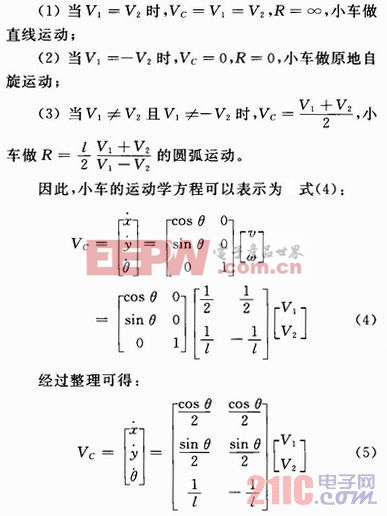
由以上分析可知,文中設計的差速驅動小車為全局可控系統,通過控制兩步進電機輸入脈沖頻率,間接控制小車的線速度VC和角速度ω,理論上可以實現小車在任意位姿的運動;同時由于系統存在約束條件
3 曲線行走實現
根據對差速驅動小車的運動學分析,在正常工作情況下,小車可以進行直線或圓弧運動,如果要使小車按照給定曲線運動,則考慮利用圓弧去近似曲線軌跡。
3.1 曲線曲率半徑計算
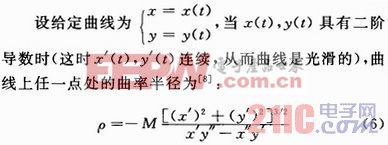
式中:M是轉向系數,當曲線上的點按逆時針轉時,M=+1;當按順時針轉時,M=-1。








評論