基于PLC的電梯監控系統方案

4.5 電梯的定向模塊
在自動運行狀態下電梯首先要定向,即上行或下行,電梯處于待命狀態時,接受轎內信號和外呼信號,將其與電梯當前所處的位置比較,確定上行還是下行,一旦定向,轎內信號和外呼信號在不滿足順向運行要求的情況下,定向信號不消號。轎頂檢修或機房檢修時,由檢修按鈕來確定運行方向,無需定向。
4.6 電梯起動、加速、穩定運行、制動模塊
在運行方向已確定,門已關好的情況下,電梯起動,進行兩級加速,然后穩定運行,在快到達停層樓層時,進行三級減速制動再停止。
5 DDC信號采集系統
電梯監視系統通常監視的信號有:電梯運行狀態(即上行、下行,2個信號),轎門狀態(即開門、關門,2個信號)、電梯所處樓層情況(即層樓信號,6個信號),這十個信號全為數字輸入點,本系統采用Honeywell Excel 50控制器進行信號采集,該控制器有8個模擬輸入(萬用的),4個數字輸入,4個模擬輸出,6個數字輸出。電梯運行狀態從PLC輸出的上升、下降繼電器觸點中采集信號,轎門狀態從PLC輸出的開門、關門繼電器觸點中采集信號,均為干節點信號,直接接DDC 50四個數字輸入,六個層樓信號在電梯到達該樓層時有一負電壓,而電梯不在該樓層時為0電壓。這六個層樓信號輸入到DDC 50的萬用模擬輸入端,外加一電壓,使輸入電壓滿足DDC 50模擬輸入信號的要求,如圖3示。下位DDC采用Honeywell Care軟件進行編程,上位采用HONeywell EBI進行監視。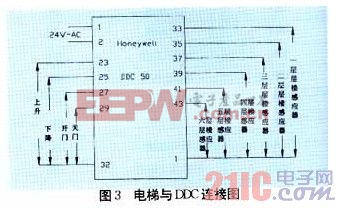
6 結束語
電梯采用PLC進行自動控制,為將信號采集到工作站進行電梯監視,在下位通過DDC進行監視信號的采集,上位工作站采用樓宇自動化企業網EBI進行數據采集,畫面設計等。該電梯監控系統現已投入使用一年多,運行情況良好,能夠滿足各項技術要求,在實際中取得了良好的效果。

pid控制器相關文章:pid控制器原理










評論