基于激光傳感器的自主尋徑智能車設計

5 電機驅動模塊及控制策略
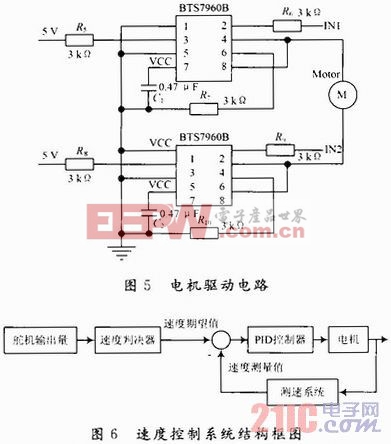
車速的控制是智能車穩定運行的關鍵因素,智能車采用RS380-ST型直流驅動電機,對電機轉速控制選用英飛凌公司的BTS7960B驅動芯片,通過改變輸入芯片的PWM波的占空比控制驅動芯片對電機的供電電壓,進而控制電機的轉速。在設計過程中采用兩片BTS7960B并聯驅動,減小導通電阻,分流,減小芯片的發熱,提高驅動能力,驅動電路如圖5所示。本文引用地址:http://www.104case.com/article/159931.htm
反饋控制是基于偏差的控制,PID控制是將偏差的比例、積分、微分通過線性組合構成控制量。偏差一旦形成,比例環節立即產生控制作用以減小偏差;積分環節主要用來消除靜差,提高系統的無差度;微分環節能反應偏差的變化趨勢,并能在偏差值變得太大之前,引入一個有效早期信號,加快系統的動作速度一減少調節時間。
智能車系統根據激光傳感陣列檢測的賽道信息由速度判決器輸出速度期望值,然后由期望值和速度反饋值(編碼器檢測獲得)運算得到速度偏差,作為控制器的輸入量,構建增量式PID控制器對小車的速度進行閉環控制,調速系統構成如圖6所示,速度判決器根據舵機控制量的大小調整速度期望值,直道上提高期望值,轉彎時適當減小期望值,避免沖出賽道,保證智能車運行的穩定性。
6 結語
設計的自主尋徑智能模型車系統以MC9S12XS128為核心控制器,電源分別對各個模塊單獨供電,避免了各模塊供電系統的干擾;路徑識別模塊采用激光傳感陣列檢測賽道信息,得到智能車與路徑的橫向偏差de,通過比例控制算法控制舵機轉向;驅動電機采用兩片BTS7960B并聯驅動,提高了驅動能力,并對直流驅動電機進行增量式PID閉環調節控制,實現了智能模型車快速穩定地自主尋徑行駛。












評論