基于激光傳感器的自主尋徑智能車設計

4 舵機控制模塊及控制策略
智能車采用Futaba公司的3010型舵機,屬于位置伺服型電機,在負載力矩小于最大輸出力矩的情況下,其輸出轉角與控制信號脈寬成線性關系,通過XS128控制器輸出不同占空比的PWM信號進行舵機轉角控制,采用有效的控制策略獲取PWM占空比控制量。本文引用地址:http://www.104case.com/article/159931.htm
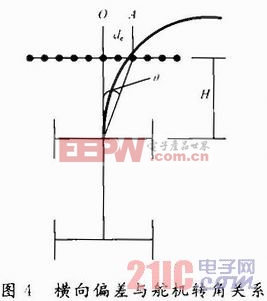
舵機控制策略采用基于模型車中心線與路徑中軸線偏差de的開環比例控制,原理如圖4所示。假設前瞻距離為H,A點踩到路徑,de為路徑橫向偏差,則車輪轉角θ應為:
![]()
在車輪轉向傳動系統中,車輪轉角θ與舵機轉角成線性關系,因此PWM占空比目標值可采用下式獲得。
PWM=Kp×θ+PWM0
式中:PWM為XS128輸出的PWM信號占空比目標值;PWM0為舵機正位時占空比值;Kp為比例控制系數。












評論