基于LEA-6R的慣性導航系統設計與實現

校驗方法如下:
其中,BUFFER[I]表示CLASS到Payload的所有無符號整型數。
陀螺儀,溫度傳感器,天線監管器的開啟和關閉等外圍設備的配置信息,其信息的子集類(Class)為CFG(Configuration input Messag es),如果CFC類對LEA-6R的配置成功,LEA-6R會返回ACK—ACK信號,反之則返回ACK—NAK信號。
例:天線配置UBX—CFG—ANT。
UBX協議說明中可以查到,協議的格式如圖6所示。本文引用地址:http://www.104case.com/article/159771.htm

默認狀態下,開啟電壓控制信號AADET引腳,允許短路檢測和自動短路修復,但電路未啟動。其中,Sync char1 Sync char2為OXB5和0X62;CLASS為0X06;ID為0X13(天線控制);LENGTH LittleEndian為0X04,0X00(指Payload的長度為4 Byte);Payload為由Bitfiled flags和Bitfiled pins二個字長16位控制位組成。Bitfiled flags是對天線監管器開啟等的控制。Bitfiledpins是對AADENT等管腳的控制。控制位對管腳的控制說明,在CFG—ANT格式中可以查到。文中,Bitfiled flags取0XC2,0X10,Bitfiled pins取0X0F,0x64;CK_A,CK_B為16位的校驗字段。
發送到LEA-6R中開啟天線監測電路的數據為B5 62 06 13 04 00 04 00 0F 64 94 5F。
1.7 UBX協議中數據的讀取
UBX協議與NMEA協議的區別是:MNEA協議每秒自動發送一次數據,UBX協議是在收到發送命令的情況下,才發送數據。發送讀取數據的命令格式除了Payload為空外,其他與UBX協議的格式相同。例如,讀取天線配置狀態,發送的數據如圖7所示。

系統在收到此命令后,會返回天線配置狀態的數據。
2 程序設計
LEA-6R的串口可直接與MCU相連接進行通訊。為及時處理GPS的信息,以及考慮到車載儀器和其他信息需要處理,在對GPS信息的處理上采取了多線程編程。
讀線程流程如圖8所示。
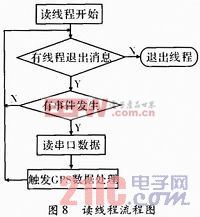
在Windows CE下,使用EVC語言對GPS的配置,數據的讀寫進行多線程編程。多線程的編程包括線程的創建、啟動、運行狀態控制、同步及數據通信和線程的正常/非正常退出。程序可分成3部分:(1)打開串口進行參數設置。(2)讀寫串口數據。(3)數據接收完成后有效數據的提取。
3 結束語
雖然該系統在隧道中長時間得不到信號時定位進度有所下降,但經實際驗證,LEA-6R傳感器組合慣性導航系統,在一般隧道和城市的高樓間能滿足實際應用要求,能使運行中的車輛取得完整的車輛定位數據,對于車輛遠程診斷儀有一定的實際意義。







評論