基于LEA-6R的慣性導航系統設計與實現

1.4 LEA-6R監測保護功能
(1)有源天線電源的供給。有源天線可獨立的外部供電,也可使用GPS的工作電壓。在使用GPS的工作電壓時,工作電壓Vcc經芯片內部的FB由Vcc_RF輸出,Vcc_RF通過外接電阻R2至V_ANT,V_ANT經由芯片內部開關和FB,經由RF_IN輸出,和同軸電纜的接地屏蔽層一同提供給有源天線。
(2)短路保護時的工作過程。當有源天線內部發生短路時,流經R2的電流增大,當ANTSHORT檢測到電流過大時,由ANTOFF斷開開關,切斷電源通路。
(3)開路保護時的工作過程。當天線開路時,電流經R2流向T2,T2導通,AADET_N引腳上的電壓上升為2.9 V,GPS在檢測到AADET_N為高電平時,即可根據事先設置采取相應的動作。
1.5 外部傳感器電路
外部傳感器為GPS接收信號微弱或衛星信號不可見時提供了必要的信息。在衛星不可見時,陀螺儀、方向傳感器、溫度傳感器和GPS衛星定位的最后一次數據在LEA-6R中進行運算,從而得出定位的數據。因此外圍傳感器是慣性導航系統中較為重要的一部分,電路如圖3和圖4所示。本文引用地址:http://www.104case.com/article/159771.htm
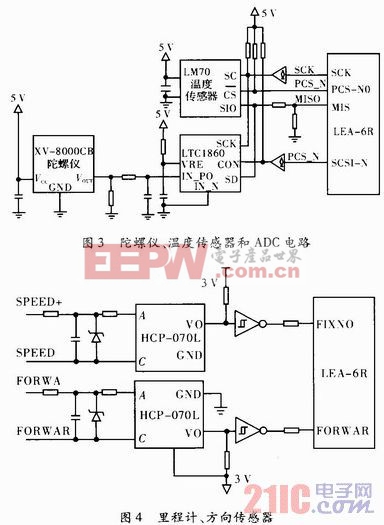
XV-8000CB陀螺儀的工作電壓是5 V,輸出模擬電壓經LTC1860的ADC模數轉換成12位數字信號,通過SPI串行總線送入LEA-6R,經SPI總線傳輸數據的還有LM70溫度傳感器。SPEED的數據由里程計,或由車內的OBD口輸出,經HCP-070L光電隔離、整型后送入LEA-6R。經LEA-6R內部運算后的定位數據直接由LEA-6R的串口或USB口輸出,輸出的數據格式符合NMEA協議或者U-Blox公司的UBX協議。
1.6 LEA-6 R的協議
LEA-6R支持NMEA-183標準協議和U—Blox公司專用的UBX協議。兩種協議可以互相切換。UBX協議的結構如圖5所示。

其中,Sync char1 Sync char1為2 Byte UBX協議的特征符,分別為OXB5和OX62;CLASS為定義了信息的子集,UBX協議將所有可交換信息都進行了分類(Class);ID為每一類子集所屬信息的信息編號;LENGTH LittleEndian為有效數據的長度,表示的時候是低位在前高位存后。長度包括特征符,Class,ID,和校驗字節;Payload為變量長度字段;CK_A,CK_B為16位的校驗字段。







評論