采用FPGA的SOPC技術研究了傳感器非線性軟件校正的實現

2.3神經網絡校正算法
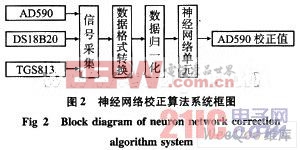
利用BP神經網絡實現非線性誤差軟件校正的文獻較多,但主要是基于PC機的仿真實驗。單片微處理器由于存儲容量和數據總線寬度的限制,網絡結構類型和計算精度只能控制在一定范圍之內。SOPC在大規模集成電路的基礎上,底層電路采用硬件描述語言實現,而軟件算法則在SOPC IDE調試環境下采用高級語言,如C語言實現。在本文中,SOPC系統板采用NIOS-Ⅱ軟核微處理器,32 bit總線,工作頻率為50 MHz,BP神經網絡采用動量法,在ALTERA公司提供的SOPC IDE調試環境下完成。算法處理結構如圖2所示。
3 算法測試
本文采用三層前向網絡,輸入層神經元2個,分別代表溫度傳感器ADS90和氣體傳感器TGS813輸入信號,DS18B20的測量值作為AD590的期望值,輸出層神經元1個,代表AD590的校正值。
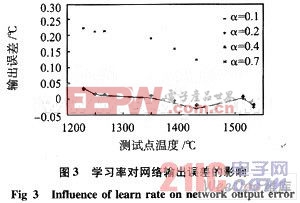
本文共采集了70個樣本對數據作為神經網絡的輸入。神經網絡的訓練采樣動量自適應算法,剔除部分不符合要求的樣本,58個樣本作為訓練樣本,8個樣本作為測試樣本。BP神經網絡采用C語言編程實現,由于微處理器與PC機相比,在工作頻率和總線結構方面還存在很大差距,因此,在計算算法的誤差輸出時,本文采用的是各個訓練樣本的絕對誤差的累加和,而不是均方根誤差,這樣,可以避免大量的乘法和開方運算,否則,算法很難收斂。 作為BP神經網絡動量法的重要參數,如果學習率參數選擇的范圍比較窄,那么,網絡性能的隨機性特點就會非常明顯,不利于網絡的推廣應用。圖3是選擇不同的學習率時網絡輸出誤差的變化情況。測試條件是動量系數為0.9,增益為1,隱含層節點6個,算法停止迭代的判斷條件是輸出絕對誤差累加和小于0.01。
圖4是58對訓練樣本完成網絡訓練后的測試結果。由于BP神經網絡的性能受隱含層節點個數影響比較大,圖中數據是在不同隱含層節點個數的條件下得到的,并與MATLAB軟件仿真得到的結果作了比較。網絡訓練的條件:學習率為0.1,動量系數為0.9,增益為1,SOPC停止迭代的判斷條件是輸出絕對誤差累加和小于0.01,MATLAB停止迭代的判斷條件是均方根誤差小于0.0001,圖中,n代表隱含層節點個數。
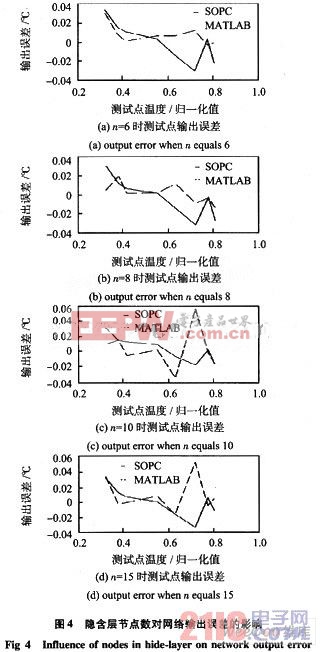
由于采用的是12 bit的A/D轉換芯片,采集數據送入FPGA系統板后,經過歸一化處理,數據類型發生變化。與MATLAB仿真軟件輸出結果保持一致,基于FPGA的神經網絡輸出取小數點后4位有效數字。由圖4可以得出:雖然在個別測試點上基于MATLAB軟件仿真結果優于SOPC的輸出結果,但在隱含層節點對算法性能的影響程度上,基于SOPC技術的輸出受到的影響比較小,穩定性好,這與SOPC技術采用32位字長有很大關系。
4 結論
基于FPGA的SOPC技術不同于IC芯片設計,它是把已有的模塊資源組合成一個系統,系統的功能直接由載體FPGA芯片實現;它又不同于傳統的基于單片微處理器的系統設計,因為SOPC系統的微處理器性能和外圍接口控制電路都是由用戶編程設定的,因此,采用SOPC技術可以節省成本,提高資源利用率,縮短開發周期和便于系統升級等特點。本文采用基于FPGA的SOPC技術研究了傳感器非線性軟件校正的問題。算法的測試結果證實了方法的可行性。










評論