基于CCD圖像傳感器的路徑識(shí)別算法分析

3)偏差DReal0為負(fù)值時(shí),前方跑道為左彎道。本文引用地址:http://www.104case.com/article/159679.htm

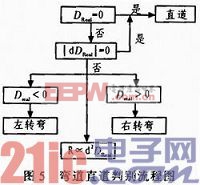
從而判斷出小車相對(duì)中心黑線的位置。DReal絕對(duì)值的大小反映了小車中心偏離中心黑線的嚴(yán)重程度,|DReal|越大,表明偏離得越厲害。這樣判斷的好處在于不管小車是否處于彎道還是直道,只要小車中心偏離了中心黑線,即只要DReal≠0就可以當(dāng)作彎道情況來(lái)進(jìn)行處理。然后分別對(duì)偏差距離DReal分別進(jìn)行一階微分(dDReal)和二階微分(d2DReal),根據(jù)偏差距離的一階微分(dDReal),就可以得到中心黑線的變化趨勢(shì),從而判斷出實(shí)際跑道是彎道還是直道,如果小車是在直道上偏離了中心黑線,則同一場(chǎng)數(shù)據(jù)中前后各點(diǎn)偏差的一階微分值dDRe al是相等的,即中心黑線與小車視場(chǎng)中心的偏差距離與兩者的前后距離呈線型變化。若實(shí)際跑道是彎道,則(dDReal)不等,上述關(guān)系呈非線性變化。根據(jù)偏差的二階微分(d2DReal),可近似得到中心黑線的曲率半徑R(直道曲率半徑視為趨近無(wú)窮),從而得到較完整的跑道信息。以上判別過(guò)程如圖5所示。
5 結(jié)束語(yǔ)
文中初步對(duì)智能車的路徑識(shí)別進(jìn)行了探索,對(duì)一些基本問(wèn)題給出較為詳細(xì)的分析及設(shè)計(jì),為進(jìn)一步的實(shí)踐打下了較為堅(jiān)實(shí)的基礎(chǔ),為真正智能汽車的設(shè)計(jì)提供了有益參考。




















評(píng)論