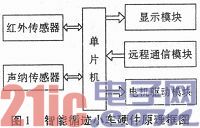
循跡小車的追蹤與避障

3 接近開(kāi)關(guān)排布及其追蹤,避障實(shí)現(xiàn)
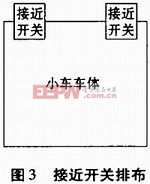
根據(jù)障礙物距離接近開(kāi)關(guān)的距離,產(chǎn)生不同的電平信號(hào)并送至單片機(jī),隨后由單片機(jī)控制電機(jī)做出相應(yīng)轉(zhuǎn)向,保證小車跟蹤物體或者遇到障礙物時(shí)轉(zhuǎn)彎。兩只接近開(kāi)關(guān)正向、水平關(guān)安裝在車頭正前方。根據(jù)接近開(kāi)關(guān)的原理可知,根據(jù)實(shí)驗(yàn)測(cè)得當(dāng)其與障礙物之間的距離大于30 cm時(shí),輸出端輸出高電平(約為3.5 V),小于30 cm時(shí),輸出低電平(約為0.5 V)。接近開(kāi)關(guān)排布如圖3所示。本文引用地址:http://www.104case.com/article/159610.htm
4 電機(jī)驅(qū)動(dòng)電路
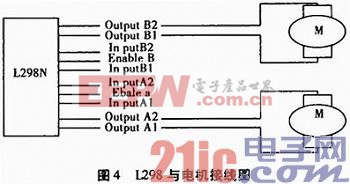
小車左右兩側(cè)的驅(qū)動(dòng)輪均由電機(jī)驅(qū)動(dòng)芯片L298N來(lái)驅(qū)動(dòng)。L298N的輸入端和使能端接收來(lái)自單片機(jī)的信號(hào),控制電機(jī)的通斷以及正反轉(zhuǎn),還可以通過(guò)向電機(jī)控制端輸入不同占空比的方波信號(hào)來(lái)調(diào)整電機(jī)轉(zhuǎn)速(PWM),其具體管腳連接如圖4所示。其中,input端口接控制信號(hào),out put端口接步進(jìn)電機(jī)兩端。當(dāng)輸出端B1、B2=01時(shí),電機(jī)正轉(zhuǎn);當(dāng)B1、B2=10時(shí),電機(jī)反轉(zhuǎn);當(dāng)B1、B2=00時(shí),小車停止運(yùn)動(dòng)。當(dāng)輸出端A1、A2= 01時(shí),電機(jī)正轉(zhuǎn);當(dāng)A1、A2=10時(shí),電機(jī)反轉(zhuǎn);當(dāng)A1、A2=00時(shí),小車停止運(yùn)動(dòng)。



評(píng)論