基于FPGA的模糊PID控制器設(shè)計

在QuartusⅡ中對仿真參數(shù)進行設(shè)置,將仿真向量文件指向由Matlab生成的*.vec文件,即可將Matlab中生成的仿真信號導入QuartusⅡ進行仿真。將仿真結(jié)束后生成的波形文件(*.vwf格式),另存為*tbl格式文件,以便將仿真結(jié)果導入Matlab中進行驗證。*tbl文件如下:
以數(shù)據(jù)文件輸入的方式將此*.tbl文件中的QuartusⅡ仿真輸出信號的數(shù)值導入Matlab中,既可以分析模糊PID設(shè)計的正確與否,也可以分析其性能優(yōu)劣。
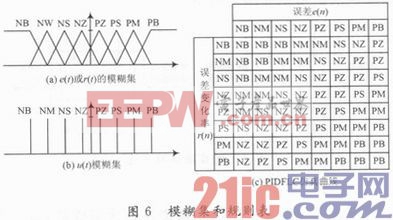
下面以基于軟件的模糊PID控制器(Software Bulid Controller,SBC)與基于FPGA的模糊PID控制器(FPGA Bulid Controller,F(xiàn)BC)做比較。在仿真中對稱三角模糊集和單值模糊集分別用于輸入和輸出變量,此外還應(yīng)用圖6中所示的64個模糊規(guī)則的規(guī)則表。本文引用地址:http://www.104case.com/article/159601.htm
將兩種模糊PID控制器用在圖1所示的控制系統(tǒng)中,并輸入0.5 V的階躍信號。選擇的受控對象是工業(yè)控制對象中的典型模型,如直流電機位置控制等。模型的離散使用的是ZOH法。離散傳遞函數(shù)如下:
![]()
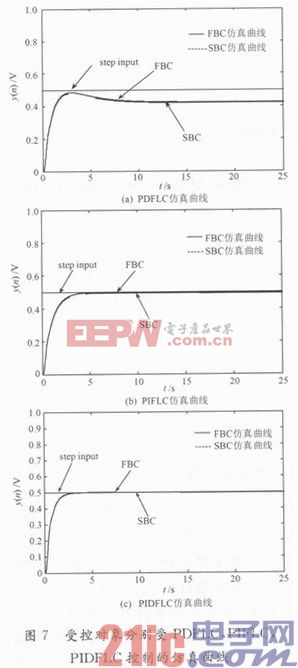
式(6)的采樣周期T=0.25 s。采用FBC和SBC進行仿真比較。因為每一個控制器均能作為PDFLC,PIFLC或PIDFLC使用,所以給出了3種控制器的仿真結(jié)果。圖7為受控對象受PDFLC,PIFLC和PIDFLC控制時的階躍響應(yīng)的仿真曲線。
3 結(jié)語
針對以傳統(tǒng)方式實現(xiàn)模糊PID控制器時,各輸入變量均需要建立模糊控制器模塊,且需要大量的規(guī)則庫,提出了改進的模糊PID控制器,以PDFLC代替PIFLC,用兩個PD模糊控制器實現(xiàn)模糊PID控制器,并利用FPGA實現(xiàn)。采用Matlab與QuartusⅡ聯(lián)合仿真,比較了基于FBC和SBC的仿真結(jié)果,表明基于FPGA的模糊PID控制器,響應(yīng)時間和控制效果較為理想,驗證了設(shè)計方案的正確性和可行性。

pid控制器相關(guān)文章:pid控制器原理








評論