基于FPGA的模糊PID控制器設計

解模糊器由兩個累加器、一個乘法器和一個除法器構成的。解模糊化模塊接受來自于推理機的四條規則序列和它們的隸屬度(在4個時鐘周期內順序接收),并產生一個明確的輸出送到增益模塊,如圖5所示。本文引用地址:http://www.104case.com/article/159601.htm
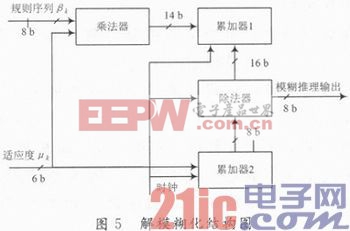
在四個連續的時鐘周期內,來自推理機的隸屬度和規則序列按順序傳送,而不是在一個周期內并行傳輸,這樣可減少FPGA中的資源消耗。
2 聯合仿真及結果
將設計的文件加載到FPGA器件之前,為了驗證設計的正確性,必須進行全面充分的功能和時序仿真。功能仿真一般對大型設計的前期代碼進行驗證,通常使用Mentor公司的Modelsim來進行;時序仿真使用QuartusⅡ或Modelsim軟件均可。模糊PID控制器的設計較小,省略了功能仿真步驟,直接進行時序仿真。
在設計中采用Matlab與QuartusⅡ聯合仿真,不僅能夠提高設計效率,而且大大增強了QuartusⅡ的仿真功能。下面介紹仿真的過程和方法。
*.vec文件是QuartusⅡ與Matlab聯合仿真時需要Matlab提供的文件。*.vwf和*.vec格式的文件是QuartusⅡ仿真軟件中時序仿真中常用的兩種文件格式。前者是在QuartusⅡ中通過波形編輯器生成的,主要用于輸入簡單數據,當輸入較為復雜數據時,用波形輸入的方法難以實現,仿真效果較差。后者是按一定仿真格式要求的文本文件輸入方式,只要滿足QuartusⅡ對仿真文件的格式要求,可以利用任何文本編輯器產生。為了加強數據生成處理能力,這里選用Matlab軟件生成*.vec文件。*.vec文件格式及其格式說明如下:
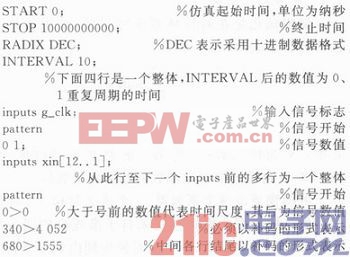
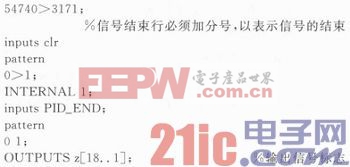
按以上格式要求,在Matlab中將輸入數據以文件的形式輸出并將其保存為*.vec格式。

pid控制器相關文章:pid控制器原理








評論