基于反饋控制的恒流型電子負載系統

2.2 電流反饋系數β的確定
也就是霍爾電流傳感器轉換系數的確定。設計中用到的電流傳感器為霍爾傳感器,輸入為電流,輸出為電壓,經測試確定霍爾系數K = 0. 8 V/ A,即當傳感器的輸入端電流為1 A時,輸出端的電壓為0.8V.β= K = 0. 8 V/A
2.3 PI調節器靜態放大系數KP的確定
根據負反饋閉環控制原理有: K =βKP KS = 1 得:KP = 1/ βKS△0. 875V/A.根據此值,選取調節器輸入、輸出電阻值,以滿足RF/RI = KP.
2.4 各電壓極性的確定和控制原理簡述
各電壓極性一般是由后向前推得, MOS管的控制電壓UG為正( + ) ,也就要求PI調節器的輸出為正( + ) ,又考慮到霍爾電流傳感器的輸出始終為正( + ) ,為了構成負反饋控制,則PI調節器的給定電壓應為負( - )。所以PI調節器采用負相輸入,由前一級的倒相器將由電位器W產生的可調正電壓變為可調的負電壓,作為恒流設定值加在調節器的輸入極,與由霍爾電流傳感器提供的電流反饋電壓進行比較,根據偏差量和正負極性由PI調節器實現比例積分調節,以實現電流( I O )恒定。改變積分電容的大小,以滿足響應快速性和穩定性要求。
3 實驗研究結果
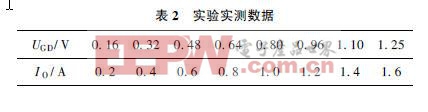
表2是實驗實測數據,從數據規律看, UGD (電位器W)和MOS管漏、源極電流IO成較好的線性關系。且IO / UGD= 1/ β= 1/ 0. 8= 1. 25.實驗中的調節響應的快速性和抗擾性能都能調為最佳。
4 幾點說明和改進措施
(1)由于采用了PI調節器, MOS管的死區不必專門設計電路來消除, MOS管的非線性在閉環內自行消除。
(2)根據被測設備的性質(阻性,感性,容性) ,總可以通過調節PI參數,以保證其快速性,穩定性和抗擾性要求。
(3)該系統具有很強的可擴展性能。可實現數字給定和調節控制。
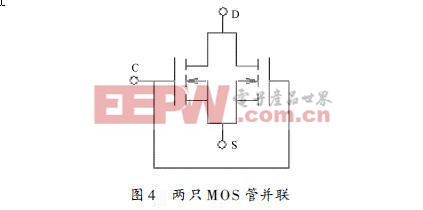
(4)對于要求測試電流較大時,可以考慮用多只MOS管的并聯組合來擴大負載容量,如圖4所示為2只MOS管的并聯組合,在此情形下,K`S= mKS; K`P = KP/m,m為所并MOS管的個數。
(5)當擴容后,需要考慮增加MOS管驅動電路。
(6)此電路中沒有耗能元件,所有的負載功率消耗僅由環路內元件承擔,主要是MOS管自耗。受MOS管自身的功耗性能限制,允許流過的電流不可能太大,即使采用并聯電路等擴容措施。所以正常使用時要充分考慮MOS管的散熱。








評論