基于MSP430的聲音定位系統的設計

(3)后級放大模塊設計
濾波之后的信號噪聲幅度在20 mV以下,為了便于比較器門限的設定,再跟一級放大以提高比較信號兩相鄰脈沖幅度之差,這有利于系統的穩定丁作。選用高CMRR運放OPA602。
(4)比較整形模塊設計
為了能對濾波輸出聲音信號進行處理,需要將模擬信號整形成能被單片機識別的TTL脈沖信號。采用比較器LM311實現對輸出信號的整形,得到的信號接到MSP430擴展的中斷口上,以實現對時間差的測量。
(5)無線發射模塊設計
本系統采用無線收發模塊RF24L01進行誤差信號的傳輸。該芯片1.9~3.6 V供電,功耗小。其內置2.4GHz天線,并采用高效的GFSK調制,抗干擾能力強。這款芯片制成了PCB板,內置專門的穩壓電路,使其在各類的電源供電情況下,都有很好的通信效果。該模塊可以通過軟件設置地址,只有收到本機地址時才會輸出數據,可直接與各種單片機連接使用,軟件編程十分方便。
3 系統軟件設計
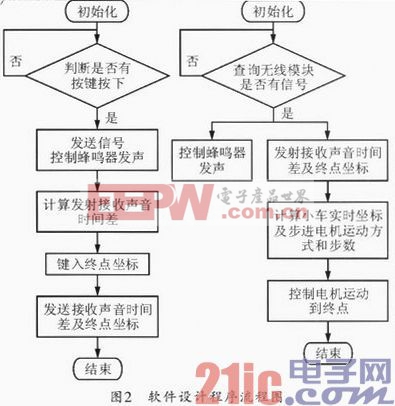
聲源引導部分的軟件設計包括對可移動聲源發聲命令的發送,時間差信號的接收與處理,載體小車上電機控制命令的發送以及無線發射模塊的控制。可移動聲源部分的單片機主要完成對無線接收模塊上寄存器的查詢,得到聲源引導部分發出的數據命令,并對可移動聲源部分的蜂鳴器和步進電機進行控制。軟件設計流程如圖2所示。本文引用地址:http://www.104case.com/article/159465.htm
4 系統測試及分析
本系統設計制作一聲音定位系統,小車作為聲源載體可以移動。A,B兩個麥克風之間距離固定為1 m,小車起始位置為直線AB上方平面的任意點,但須保證車頭方向與AB中垂線Ox垂直。鍵盤輸入目的坐標點,小車應能精確快速到達指定點。
4.1 測試數據
數據如表1所示。

4.2 測試結果分析
從測得數據來看,精確度比較可靠,測得坐標誤差最大為0.8 mm,控制小車運動到指定位置的誤差最大為1.0 cm,這可能是由于小車在啟動和轉彎過程中帶來的,也可能是由于前面測坐標的誤差放大帶來的。







評論