簡易智能電動車的設計

摘要:智能小車采用TI公司的MSP430F2274單片機作為核心控制芯片,由液晶顯示模塊、電機驅動模塊、傳感器模塊、電源模塊組成。在機械結構上,用兩個直流電機作為兩個前輪,再外加一個從動輪,使小車的轉向更加靈敏。采用PWM驅動芯片控制電機,紅外LED和一體化接收頭來避障。基于可靠的硬件設計和穩定的軟件算法,實現避障、測速等功能。
關鍵詞:MSP430;避障;PWM脈寬調制;低功耗;紅外傳感器
智能機器人的發展非常迅速,已經廣泛應用于機械、電子、交通等領域,人們也在不斷地著力于改進機器人的智能,讓它更好地為人們提供便捷、舒適的生活。而智能電動車作為機器人的典型代表,也在不斷地發展,方便人們對安全性能的追求。
文中智能小車采用TI公司的MSP430F2274單片機作為核心控制芯片,由液品顯示模塊、電機驅動模塊、傳感器模塊、電源模塊組成。基于可靠的硬件設計和穩定的軟件算法,實現智能避障、測速等功能。
1 系統設計
1.1 設計思路
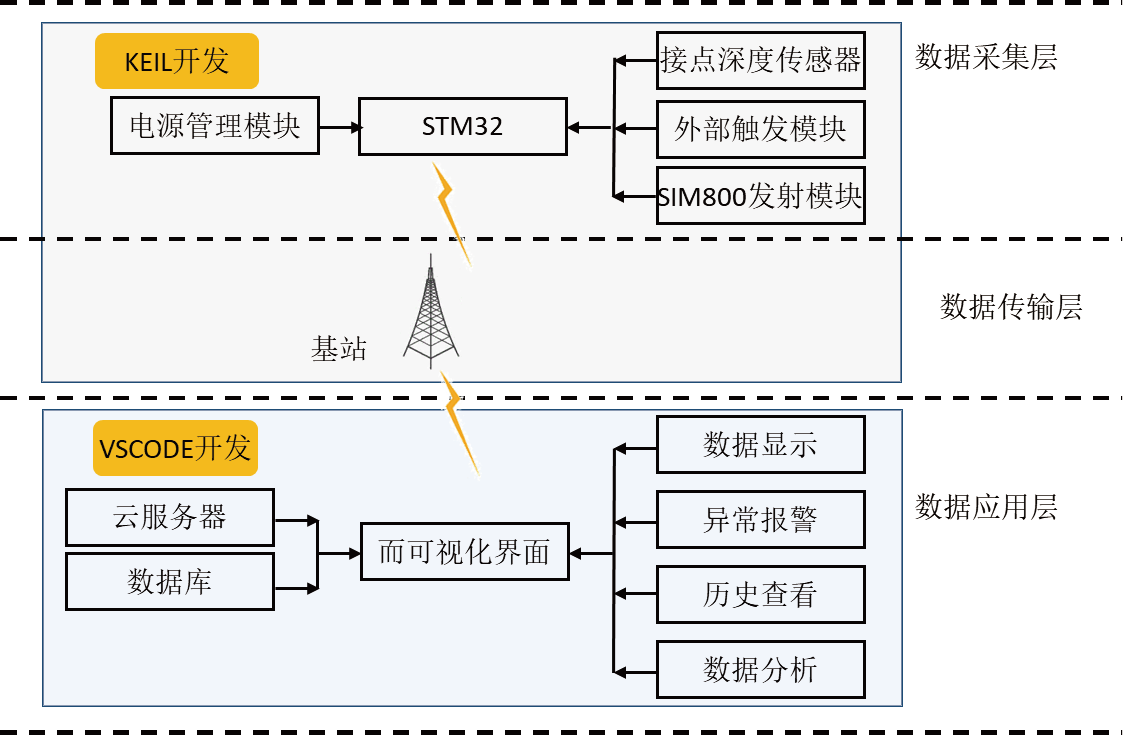
本系統劃分為控制部分和信號檢測部分。其中信號檢測部分包括:障礙物探測模塊,路程測量模塊。控制部分包括:電機驅動模塊,顯示模塊,控制器模塊,計時模塊,狀態標志模塊。模塊框圖如圖1所示。

1.2 設計方案
(1)控制器模塊
本系統的控制器主要用于各個傳感器信號的接收與辨認、控制小車電機的動作、控制顯示車速與運行的時間以及小車在停止時發出聲光等信號。
本系統的控制器采用TI公司的MSP430單片機。MSP430在電池供電的低功耗應用中具有獨特的優勢。其工作電壓為1.8~3.6 V,正常工作時功耗可控制在200μA左右,低功耗模式可實現2μA甚至0.1μA的低功耗。MSP430系列單片機作為性能優異的MCU在中國已經得到了廣泛的應用。MSP430具有高集成度,通常在單個芯片上集成了12位的A/D轉換器、比較器、多個定時器,以及片內USART、看門狗、片內DCO等。一般單片就可滿足大多數的應用需要。支持JTAG在線編程,可以方便地實現程序的下載、仿真、調試和升級。
(2)電機驅動模塊
電機的驅動電路主要通過電機的正轉和反轉實現小車前后或者左右方向的選擇,并使用PWM控制芯片來實現對電機的控制,L298芯片實現電機的驅動。
(3)顯示模塊
在小車運行過程中,需要對運行的時間和路程做必要的顯示,系統選用液晶顯示屏顯示時間和路程。液晶顯示屏(LCD)具有輕薄短小、低耗電量、無輻射危險,平面直角顯示以及影像穩定不閃爍等優勢,可視面積大,畫面效果好,分辨率高,抗干擾能力強等特點。
(4)障礙物探測模塊
采用左右兩個紅外傳感器。紅外傳感器,是目前使用比較普遍的一種避障傳感器,可調節紅外傳感器的檢測距離為10~80 cm,開關量輸出(TTL電平),簡單、可靠。
(5)計時模塊
計時模塊要求對小車從啟動到停止的過程進行計時,最小單位為0.01 s。由于本系統的控制器是由單片機構成的,其內部有很好的定時系統,因此系統使用MSP430F2274內置的定時器實現該模塊功能。
(6)電源模塊
雙電源供電。電機驅動部分、顯示電路、紅外傳感器部分用小型蓄電池供電。小型蓄電池具有,輸出功率大,在負載不穩定的情況下能保證合適的電壓和電流輸出的特點。單片機和傾角傳感器則對電壓參數要求比較高.使用9 V干電池穩壓到5 V。這樣設計雖然不如單電源方便靈活,但可以將電極驅動所造成的干擾有較高的抑制,提高了系統的穩定性能。
2 系統的硬件電路設計與實現
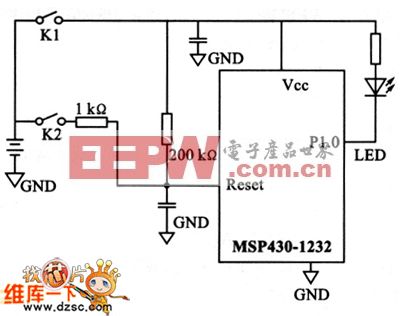
2.1 控制電路的設計
單片機接收從傳感器檢測電路輸入的邏輯信號和脈沖信號,并將輸入的信號進行處理運算,以控制電流或控制電壓的形式輸出給被控制的單元電路,完成各項任務要求。






評論