沖孔打樁機的自動控制系統設計

3 沖孔打樁機自動控制系統硬件電路設計
根據沖孔打樁機自動控制系統原理圖,設計硬件電路,如圖3所示。系統的硬件電路設計遵循模塊化的設計方法,主要包括控制器模塊、電源模塊、剎車控制模塊、離合控制模塊、電機控制模塊、人機接口模塊及其他保護電路等。本文引用地址:http://www.104case.com/article/159423.htm
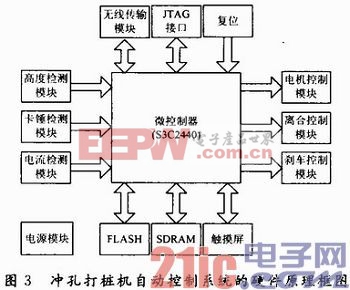
(1)控制器模塊。系統的微控制器采用擁有低功耗模式的S3C2440,它是Samsung公司以ARM為架構推出的ARM920T的微處理器核心,擁有16 KB的資料快取和16 KB的指令快取、MCU快取,它有固定的32 b運算碼寬度,能降低編碼數量所產生的消耗,可以減輕解碼和管線化的負擔,大多均為一個時間周期執行,有強大的索引定址模式,它精簡且快速的2-priori-ty-le Vel中斷子系統,具有可切換的暫存器組,它支持ARM處理器16-bit(Thumb)指令模式。工作頻率為499 MHz,最高工作頻率可達533 MHz。
(2)電源模塊。在設計系統中有多種電壓,電源電壓分為直流1.8 V,3.3 V,5 V,和交流220 V幾種。其中1.8 V用于微控制器的內核供電;3.3 V用于微控制器的外設I/O口線供電;5 V用于其他大部分芯片供電;24 V為外圍接口電路供電;交流220 V用于AC—DC(220 V轉24 V)供電。電源電路主要經過穩壓芯片穩壓和電容濾波。主要電路如圖4和圖5所示。
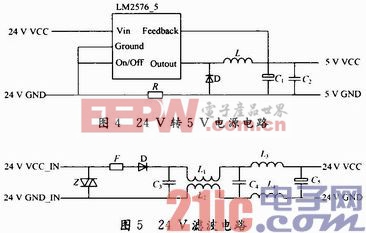
圖中R為0 Ω,C1為25 V 100μF的電解電容,C2為104獨石電容,C3,C4為CBB電容,C5為50 V470μF的電解電容,Z為防雷管,F為保險,L1和L2組成共模扼流圈,L3,L4為差模電感。
(3)剎車控制系統模塊。剎車、離合電機的控制歸根到底都是對電機的控制,由于需要控制電機的通斷,所以控制也只需要簡單的繼電器控制,故采用普通I/O口和功率晶體管即可,如圖6所示,F為保險,Z為防雷管,Q為晶體管BCP56。

(4)離合控制系統模塊。離合控制的設計方案和剎車控制的設計方案相似。
(5)卡錘檢測模塊。在打樁機工作過程中,要實時采集打樁機的高度和速度信號,以便對樁機進行控制。本設計中采用霍爾傳感器對高度進行測量,在打樁機運行過程中,工作環境復雜多變,有時會造成卡錘和吸錘等故障,此時及時檢測此類信號,并反饋給微控制器,以便及時調整控制策略,提高打樁機的工作效率。
(6)電機保護電路的設計。系統采用45 kW的三相異步電機,它是提錘升降的動力來源。電機保護電路的設計對于整個系統來說非常重要。電機保護電路的設計主要包括2個方面:
一是電機的過流保護,電機在起錘和突然啟動時會產生大的電流,在本設計系統中,采用電流互感器來檢測起錘的電流信號,以及實現對電機的過電流保護;
二是電機的繼電保護,采用繼電器來控制電機的電源開關,以便在緊急情況下對電機和整個系統進行保護。

互感器相關文章:互感器原理
霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理 三相異步電動機相關文章:三相異步電動機原理










評論