具有顏色識別功能的類人機器人設計

如上所述,最佳閾值的判斷標準是使得類間方差最大。于是通過遍歷每一個灰度值,并計算其劃分帶來的類間方差,總能找到一個合適的閾值滿足條件。由于式(4)計算二階中心矩計算量較大,考慮到:
就轉化為最大化式(6)。
接下來的工作就是對圖像進行標定,這里所指的標定就是根據二值化后的圖像,計算出目標區域的外接矩形位置。在目標構成比較簡單的情況下,投影法是效率最高的方法,而當場景中存在多個目標時,多數情況下需要進行連通域計算。拓撲學中把連通性定義為,區域內任意兩點之間存在至少一條曲線可以將兩者連接。目前的連通域標記方法主要分兩類:掃描法和輪廓跟蹤法。掃描法的基本思路是逐個檢查每個像素的值和連通性,從而獲得所有的連通性描述信息,然后根據每點之間的相互關系計算出最后的區域個數和構成關系。基于掃描的連通標記演示如下(以8連通為例):
首先對二值圖像進行行掃描得到線段連通標記,如圖5所示。然后檢查每行之間線段與上一行線段之間的連通關系,并更改標記。本文引用地址:http://www.104case.com/article/159315.htm

第1行:線段1創建標記A。
第2行:線段2、1之間連通,線段2標記為A;線段3同理標記為A。
第3行:線段4、2之間連通,線段4標記為A;線段5創建標記為B。
第4行:線段6、4之間連通,線段6標記為A;線段6、5之間連通,將線段5的標記由B變為A。
第5行:線段7創建標記B;線段8、6之間連通,線段8標記為A。結果如圖6所示。

將圖像標定完畢可以去掉圖像中的噪點,并且找到目標的中心,實現目標的定位。
3 實驗與結果分析
將控制卡裝到機器人上,控制機器人運動,在運動中攝像頭采集圖像,并且用方框將目標進行標定。利用上述顏色識別算法對圖紅色繡球進行標定,得到如圖7所示的結果。
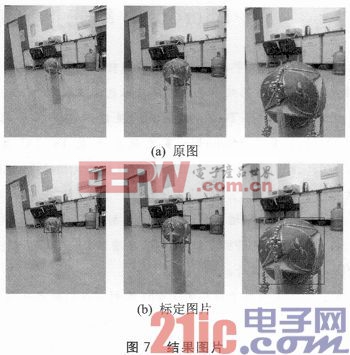
隨著機器人的運動,繡球在圖像中的位置發生變化,機器人根據標定結果,就可以得到繡球的位置,根據位置調整自己的運動準確找到繡球。圖像采集的速度達到15幀/s,舵機控制準確度達到0.32°,可以圓滿完成比賽任務。
結語
本文以S3C6410作為主控芯片,設計了具有視覺識別功能的類人機器人控制系統。改進的顏色識別算法利用查表法、類間方差法、連通域等方法對圖像進行處理,取得了良好的視頻識別效果。實踐證明,由該控制系統的設計方案制作而成的類人機器人,具有良好的自主控制穩定性和較好的視覺識別能力,能夠較出色地完成比賽。





評論