一種船載光電穩定跟蹤伺服系統的設計與實現

2.4.3 DSP伺服控制器位置環路控制算法
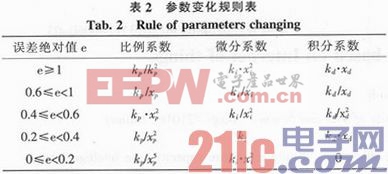
位置環主要實現對目標指令的快速準確跟蹤,其控制算法采用變參數PID控制,變參數PID控制是一種通過誤差大小改變比例、積分、微分作用強度的控制算法。變參數PID控制參數隨誤差變化情況的規則如表2所示,其中Kp、Ki、Kd分別為比例、積分、微分系數,它們的值可通過常規PID整定的方法得到。而xp、xi、xd分別為比例、積分、微分的變化量,只要誤差區域劃分合理,就能很好地減小干擾對轉臺的影響,加快系統動態響應速度。本文引用地址:http://www.104case.com/article/159287.htm
3 控制系統軟件設計
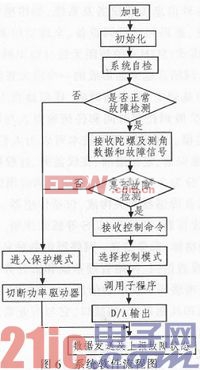
系統軟件在CCS3.3開發環境下用C語言編寫,采用模塊化設計,系統軟件由1個主程序3個子程序組成,3個子程序分別對應自動跟蹤、引導跟蹤、手動跟蹤三種工作狀態,主程序接收上位機控制命令后對應相應的工作狀態調用子程序,系統軟件主程序流程如圖6所示。
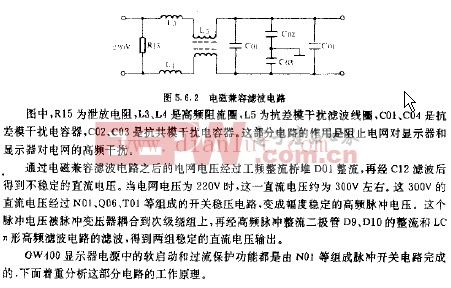
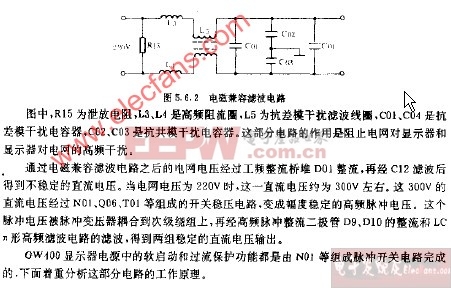
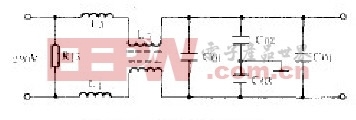
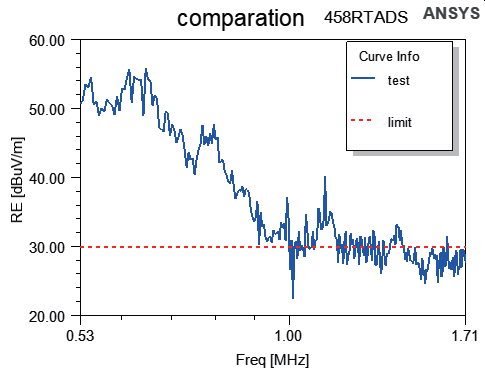
4 系統電磁兼容設計
光電穩定跟蹤伺服系統集光學、電子、電氣、精密機械為一體,工作時會產生各種感應和干擾,這些干擾有可能影響系統正常工作,因此伺服系統的電磁兼容設計不容忽視。本系統電磁兼容設計主要從以下幾個方面考慮:
1)屏蔽,采用帶屏蔽層的信號線,伺服控制機箱機械結構采用屏蔽設計。
2)隔離,電路設計中高壓與低壓隔離,強電與弱電隔離,動力電與信號電隔離,模擬電路和數字電路分開,交流電源與直流電源分開。
3)接地,數字地與模擬地分離,最后接于電源地,接地線短而粗。
4)濾波,對測角編碼器信號光纖速率陀螺信號進行數字濾波;對功率驅動器的功率電源加無感電容濾波;對電源及其他信號進行有效濾波,減小干擾。
5 系統工程試驗測試結果
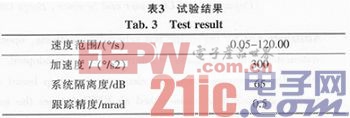
經測試,系統試驗結果如表3所示。
6 結論
文中介紹的船載穩定伺服跟蹤系統研制出工程樣機兩套,經過工程測試,該伺服系統工作穩定可靠,系統電磁兼容性能良好,對同類伺服系統的設計和制造提供了經驗和依據。

pid控制器相關文章:pid控制器原理






評論