一種船載光電穩定跟蹤伺服系統的設計與實現

摘要:介紹了一種船載光電穩定跟蹤伺服系統,著重介紹了功率驅動器與基于TMS320F28335 DSP的數字伺服控制器的設計與實現,簡單介紹了系統軟件設計和電磁兼容設計。工程實踐結果表明:該系統具有較快的動態響應和較強的抗干擾性,能有效地隔離船體搖擺擾動,對類似的工程設計具有一定的參考意義。
關鍵詞:穩定跟蹤;TMS320F28335;數字伺服控制器;電磁兼容
船載光電穩定跟蹤伺服系統的主要任務是隔離浪涌引起的船體搖擺,同時完成對目標的精確跟蹤。本系統通過光纖速率陀螺反饋構成速率穩定環路,敏感船體角速率變化,反方向補償該速率的變化,保證光電負載瞄準線穩定;同時接收上位機或者光電傳感器發送的位置偏差指令,控制負載框架使光電設備準確跟蹤目標,實現穩定跟蹤功能。
1 系統組成
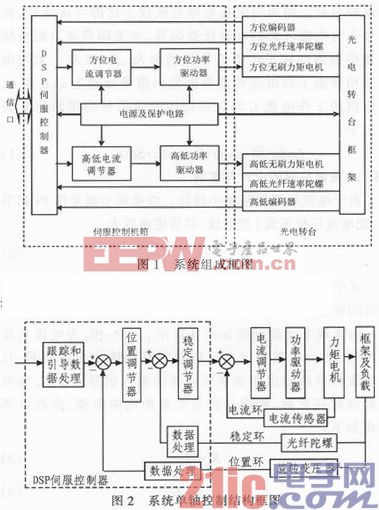
系統由伺服控制機箱和光電轉臺兩大部分組成,其中伺服控制機箱由箱體、電源及保護電路、DSP伺服控制器、電流調節器、功率驅動器組成;光電轉臺為兩軸系,無刷直流力矩電機、測角編碼器分別套軸安裝在光電轉臺上,方位軸系、高低軸系分別獨立安裝一套光纖速率陀螺,感應本軸系的角速率。系統組成框圖如圖1所示。
2 系統的設計與實現
2.1 系統控制結構
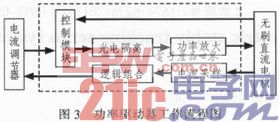
為了實現系統的高精度和高可靠性,系統控制結構采用多環路串級控制方案,其系統單軸(方位軸、高低軸)控制結構圖如圖2所示,位置調節器和穩定調節器由DSP伺服控制器實現數字調節,采用該設計方案既能充分發揮DSP伺服控制器的高速數據處理能力,又能簡化電路,增加系統設計靈活性。
2.2 功率驅動器設計與實現
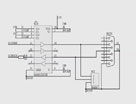
作為無刷直流力矩電機的直接驅動部件,功率驅動器的性能對整個伺服系統的性能具有決定性作用。功率驅動器是將電流調節器的控制誤差信號進行功率放大,以驅動電機帶動負載轉動。本系統功率驅動器主要由基于MC33035的無刷電機控制模塊、基于高速光耦HCPLA504的光電隔離電路、基于三菱PM25RAL120的功率放大模塊和電流采樣電路、邏輯組合電路組成,具有抗干擾性強、可靠性高、穩定性好等優點。功率驅動器工作流程圖如圖3所示,虛框內為功率驅動器。
控制模塊接收外部控制信號(包括無刷電機轉子位置傳感器信號、控制模塊使能信號、剎車控制信號、電機旋轉方向信號和誤差控制信號等),產生驅動模塊需要的6路原始驅動控制信號。6路原始驅動控制信號經過光耦隔離由功率放大模塊進行功率放大,驅動無刷直流力矩電機。

pid控制器相關文章:pid控制器原理






評論