基于TMS320DM643的設備監控系統中彩色圖像處理的實現

2.3 彩色圖像處理算法
對彩色圖像進行處理,首先應選取顏色模型,常用的顏色空間有RGB、HSI、YCbCr等,本系統選用YCbCr空間。與對灰度圖像處理的方法不同,彩色圖像有兩類處理方法:1)單獨處理顏色空間的每一個通道,再復合成結果圖像;2)把像素的顏色看作顏色空間中的一個點,也可以看作是一個向量,在向量空間中處理圖像。另外,彩色圖像處理還涉及彩色圖像增強、彩色圖像濾波、彩色圖像壓縮和彩色圖像分割等處理算法。本文中,對等離子體發生裝置的彩色圖像進行了圖像預處理、背景差分、目標檢測等算法實現。
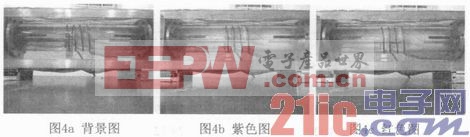
在等離子體發生裝置產生等離子體的過程中,隨著裝置兩端電壓的升高,裝置內氣體顏色會發生相應變化,由無色變為紫色,再由紫色變為紅色,變化過程如圖4所示,圖4a是初始狀態背景圖,圖4b是裝置內氣體變化為紫色時的圖,圖4c則是裝置內氣體變化為紅色時的圖。本文引用地址:http://www.104case.com/article/159282.htm
對等離子體發生裝置的圖像采集處理算法具體步驟如下:
(1)采集初始的N幀圖像,取均值,再進行中值濾波,作為初始背景圖Bg(x,y)。
(2)后續采集的每幀圖像Cur(x,y)與初始背景圖Bg(x,y)進行分Y、Cb、Cr三通道分別進行差分運算,再濾波得到差分圖像Sub(x,y):
Sub_Y(x,y)=Cur_Y(x,y)-Bg_Y(x,y);
Sub_Cb(x,y)=Cur_(2b(x,y)-Bg_Cb(x,y);
Sub_Cr(x,y)=Cur_Cr(x,y)-Bg_Cr(x,y);
(3)差分后發生變化的主要是Cr像素部分,所以求取Sub_Cr(x,y)的最大值Max Sub Cr及其位置x,y。
(4)求出與Max Sub Cr相似的所有像素,滿足:(Sub_Cr(x,y)-Max_Sub_Cr)2T并求出滿足上式的所有x,y的最大最小值,x_max,x_min,y_max,y_min。
(5)由于等離子體發生裝置近似長方體,所以選取矩形區域(X_min:x_max;y_min:y_max)為有意義區域,后續循環處理只需對該區域進行處理即可,減少了近1/3的數據處理量。
(6)對有意義區域的像素值進行統計,設定一定閾值即可實現判別顏色狀態。
3 實驗結果與分析
系統幀率為25幀/s,圖像分辨率為720×576像素。在實驗過程中,觀察等離子體發生裝置的顏色變化狀態,通過將人工判別結果與實際系統的判別輸出進行比較,判斷系統運行可靠性。實驗結果如表1所示。

系統幀率為25幀/s,實時性實驗主要測試系統平均單幀判別時間,衡量基準是該值是否低于幀間隔40ms。實驗結果如表2所示。
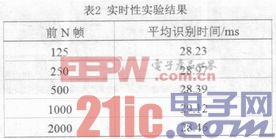
經實驗證明,系統識別效果良好,判別準確率達95%以上。同時系統性能方面表現良好,負載均衡,平均單幀識別時間低于29.2ms,小于幀間隔40ms,能夠同時滿足高實時性和高識別率的要求。
4 結語
基于TMS320DM643的設備監控系統能實時地檢測等離子體發生裝置的狀態變化,在光照變化時識別準確率依然較高。本文根據等離子體發生裝置的實際需要,設計開發了基于TS320DM643的硬件平臺,實現了實時目標檢測。同時,在硬件程序實現過程中對程序進行了優化,應用了IMGLIB圖像處理函數庫中的中值濾波函數IMG median 3×3,大幅度減少了CPU訪問外設SDARM所消耗的時間,同時使用DSP/BIOS實時系統,增強了系統實時性。系統也將不斷進行優化,在高實時性與高識別率上實現更好的融合。






評論