一種基于LEACH的改進(jìn)型無線傳感器網(wǎng)絡(luò)路由算法

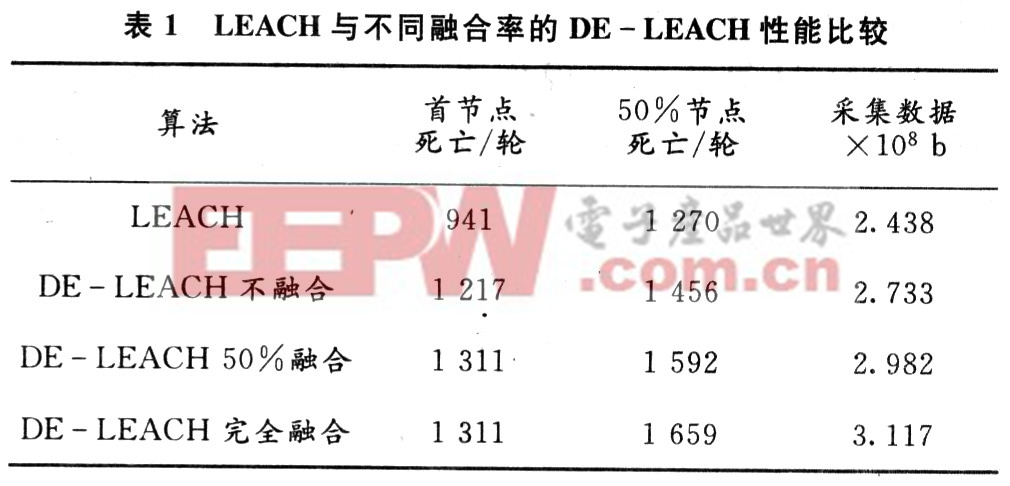
完全融合,即將第一層簇頭發(fā)送來的數(shù)據(jù)包壓縮成一個(gè)2 000 b的數(shù)據(jù)包發(fā)送到基站。由于融合率較大,不僅要用到數(shù)據(jù)級融合,特征級融合,還要用到?jīng)Q策級融合。即最后傳輸?shù)交镜囊巡皇呛唵蔚臄?shù)據(jù),而是第二層簇頭節(jié)點(diǎn)對采集到的數(shù)據(jù)進(jìn)行綜合分析后所得到的結(jié)果。仿真發(fā)現(xiàn),完全融合后,DE―LEACH的首節(jié)點(diǎn)死亡時(shí)間比LEACH晚40%,50%節(jié)點(diǎn)死亡時(shí)間晚30%(如圖5)。數(shù)據(jù)采集總比特?cái)?shù)DE―LEACH比LEACH高出28%(如圖6)。
由仿真比較可見,綜合考慮了簇頭節(jié)點(diǎn)到基站的距離以及剩余能量并據(jù)此選出第二層簇頭的DE―LEACH算法,性能較LEACH有明顯的改善。
DE―LEAcH算法的優(yōu)點(diǎn):延長了首節(jié)點(diǎn)死亡時(shí)間,曲線斜率明顯比LEACH大,縮短了首末節(jié)點(diǎn)死亡時(shí)間間隔,相比于LEACH,節(jié)點(diǎn)死亡時(shí)間更加集中,監(jiān)控盲點(diǎn)出現(xiàn)時(shí)間短,重新部署傳感器節(jié)點(diǎn)更加經(jīng)濟(jì)高效;數(shù)據(jù)采集總量明顯提高。DE―LEACH算法的不足:由于在原來LEACH算法的簇頭與基站之間又增加了一跳路由,網(wǎng)絡(luò)延遲有所增加。另外,節(jié)點(diǎn)的運(yùn)算能力要有所提高。就仿真來看,要想得到更長的網(wǎng)絡(luò)生存時(shí)間和更高的數(shù)據(jù)采集量,就要加大數(shù)據(jù)融合率,這對節(jié)點(diǎn)的數(shù)據(jù)融合能力提出了更高的要求。在實(shí)際應(yīng)用中,需要根據(jù)應(yīng)用對性能和成本的要求進(jìn)行綜合考慮。
3.2 事件驅(qū)動型DE―LEACH生存期分析
針對傳感器節(jié)點(diǎn)所采集的數(shù)據(jù)(如溫度、壓力等)在較短時(shí)間內(nèi)的相關(guān)性,可設(shè)定一個(gè)門限值,當(dāng)相鄰兩次所采集數(shù)據(jù)變化超過此門限值時(shí),節(jié)點(diǎn)才向簇頭發(fā)送數(shù)據(jù),并保留后一次數(shù)據(jù)在該節(jié)點(diǎn)存儲器中;若變化小于門限值,則不進(jìn)行發(fā)送,仍保留前一次數(shù)據(jù)以防止數(shù)據(jù)以漸進(jìn)的方式變化。門限值可設(shè)定為前次采集數(shù)據(jù)的百分比或具體的數(shù)值,視具體情況而定。圖7的仿真設(shè)定門限值為前次采集數(shù)據(jù)的10%(完全不融合情況)。

由圖7可見加入事件驅(qū)動因素后,網(wǎng)絡(luò)生存期延長約9%,仿真中為方便采集數(shù)據(jù)用隨機(jī)數(shù)的方式產(chǎn)生,不具有相關(guān)性。當(dāng)實(shí)際應(yīng)用中的數(shù)據(jù)具有相關(guān)性時(shí),生存期延長將更加明顯。另外,門限值的大小可根據(jù)需要更改,適應(yīng)性較強(qiáng)。加入事件驅(qū)動的缺點(diǎn):由于需要存儲兩次采集的數(shù)據(jù)進(jìn)行比較,提高了對傳感器節(jié)點(diǎn)存儲能力的要求。
4 結(jié) 語
路由協(xié)議在很大程度上決定了網(wǎng)絡(luò)的整體性能。因此,作為無線傳感器網(wǎng)絡(luò)核心技術(shù)之一,路由協(xié)議一直是研究的熱點(diǎn)。LEACH算法是一種經(jīng)典的層次型路由協(xié)議,它利用簇頭輪換機(jī)制有效的將能量消耗較均勻地分?jǐn)偟秸麄€(gè)網(wǎng)絡(luò)。在LEACH算法的基礎(chǔ)上提出了一種基于距離和能量選擇第二層簇頭的兩層改進(jìn)型LEACH算法DE―LEACH,并簡要分析了事件驅(qū)動對網(wǎng)絡(luò)生存期的影響。仿真結(jié)果表明,該算法進(jìn)一步平均了網(wǎng)絡(luò)中的能量消耗,有效延長了網(wǎng)絡(luò)生存時(shí)間,提高了網(wǎng)絡(luò)的數(shù)據(jù)采集能力。
LEACH算法的實(shí)現(xiàn)作了一些假設(shè)。其中一點(diǎn)是網(wǎng)絡(luò)中每個(gè)節(jié)點(diǎn)當(dāng)選簇頭后都進(jìn)行全網(wǎng)廣播,這樣的假設(shè)在網(wǎng)絡(luò)覆蓋范圍較大的情況下?lián)p耗將明顯加大,因此在大規(guī)模應(yīng)用中多層多跳路由成為必然的選擇。這也將是今后工作繼續(xù)探討的方向之一。











評論