一種基于LEACH的改進型無線傳感器網絡路由算法

另外,考慮到傳感器節點所采集的數據在較短時間內具有相關性,可以采用事件驅動的方式進一步延長網絡生存期。下面將對DE―LEACH與LEACH進行性能上的比較,并仿真分析了加人事件驅動因素后DE―LEACH的生存期改善程度。本文引用地址:http://www.104case.com/article/158076.htm
3 仿真分析
3.1 DE―LEACH與LEACH性能比較
利用Matlab工具對LEACH算法和DE―LEACH算法進行仿真比較,主要比較:
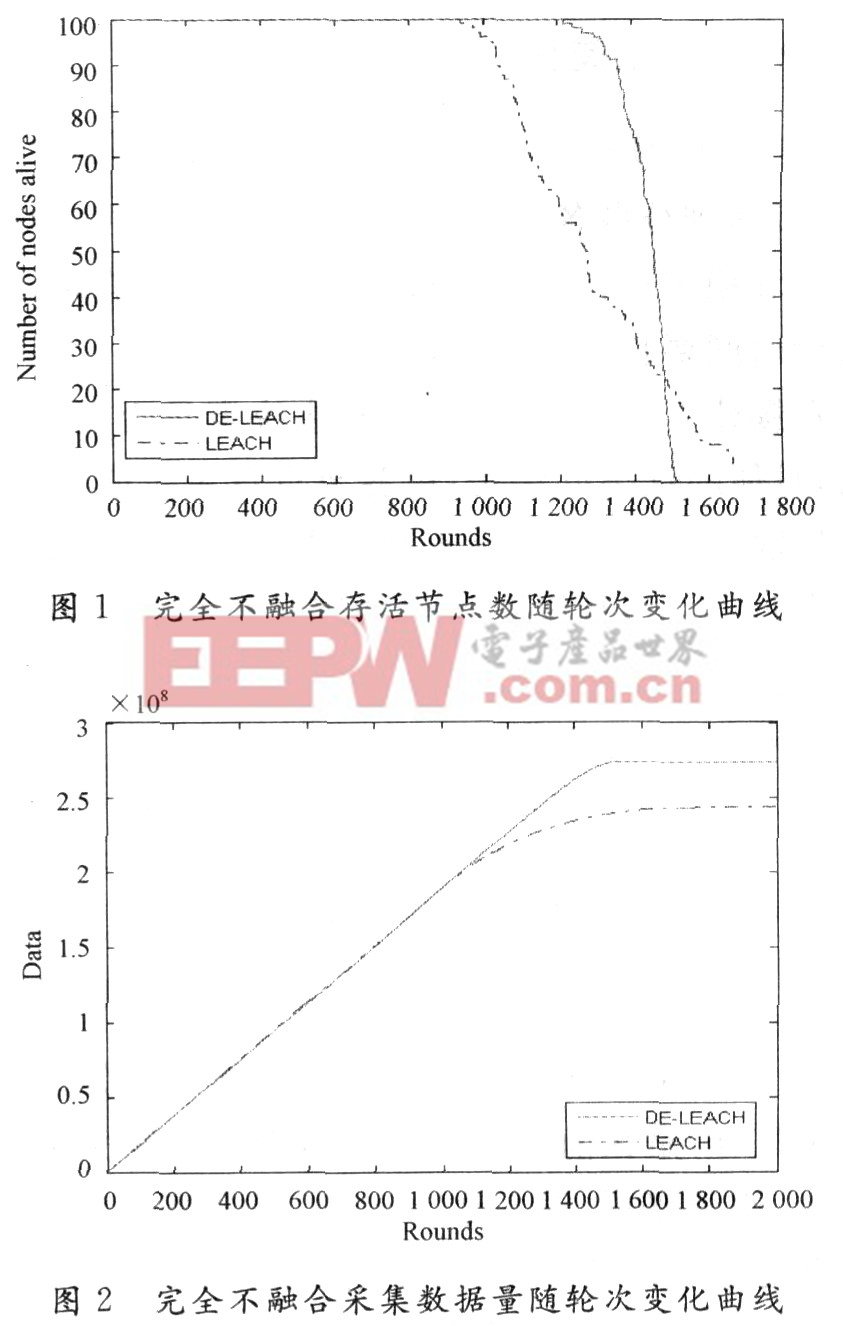
(1)存活節點數隨輪次變化曲線;
(2)數據采集總比特數(二次融合前)隨輪次變化曲線。
仿真中,假設無線傳感器網絡由100個相同的無線傳感器節點組成,隨機拋撒在100 m×100 m的區域內,遠程基站位于坐標點(x=0,y=一100)。每個節點初始能量為O.5 J,發送和接收電路損耗為Elec=50 nJ/b,數據融合消耗為Eda=5 nJ/b。放大系數為Efs=10 pJ/b/m2(dd0),Emp=O.001 3 pJ/b/m4(d>d0),其中![]() 數據包長度為2 000 b,廣播包長度
數據包長度為2 000 b,廣播包長度
為200 b,總帶寬為1 MHz。為簡化仿真復雜度,監測區域內通信按自由空間模型取Efs=10 pJ/b/m2,而簇頭節點與基站通信由于距離較遠(>100 m),按多徑傳播模型取Emp=O.001 3 pJ/b/m4。
根據第二層簇頭對收到的第一層簇頭數據進行二次融合的融合率不同,這里分完全不融合、50%融合、完全融合分別進行了仿真比較。
完全不融合,即將第一層簇頭發送來的數據包不加處理地組成一個長數據包發送到基站,這時第二層簇頭相當于只是完成了數據接收和轉發的功能。仿真發現,即使在完全不融合的情況下,DE―LEACH的首節點死亡時間也要比LEACH晚30%,50%節點死亡時間晚15%(如圖1)。數據采集總比特數DE―LEACH比LEACH高出12%(如圖2)。雖然末節點死亡時間早于LEACH,但網絡中存活期非常集中,網絡出現大面積監控盲區的時間短,若要保證數據采集的持續性和完整性,對監控區域重新部署節點將比LEACH算法更經濟有效。
50%融合,即將第一層簇頭發送來的數據包壓縮一半之后發送到基站。各個第一層簇頭發送的數據包中仍然含有第一層簇頭數據包的包頭等基站不需要的冗余信息,可以進行進一步融合。仿真發現,進行50%融合后,DE―LEACH的首節點死亡時間比LEACH晚40%,50%節點死亡時間晚25%(如圖3)。數據采集總比特數DE―LEACH比LEACH高出22%(如圖4)。













評論